|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|

abstract
自動車を中心とする社会交通システムの発展において,過去から未来に向けてのエレクトロニクスの貢献について概観する.カーエレクトロニクスは,これまで排出ガス浄化・燃費向上から始まり,車単体や社会との連携により移動の安全確保や車内の快適・利便性の向上を支えてきた.
今後は,交通情報システムから社会交通システム全体の進歩にますます貢献してゆくであろう.
キーワード:自動車,社会交通システム,マルチモーダル,ラストワンマイル,カーエレクトロニクス
移動体として自動車を見たときの本質的な機能は,①安全に,②快適に,③経済的に,④早く目的地に到達することである.過去から現在の進化はこの本質に沿って進んでおり,今後も基本は変わらないであろう.補助的機能としてのカーラジオに始まった自動車のエレクトロニクスが,主機能である「走る・曲がる・止まる」機能に本格的に導入されたのは通称マスキー法と呼ばれる排出ガス規制への対応だった.最初はアナログ回路で構成されたエンジンの電子式燃料噴射装置は,日本では昭和53年規制対応の頃からマイコン(MPU: Micro Processor Unit)制御の導入が開始され飛躍的な制御性能向上を遂げた.その後車載MPUはいろいろな機能に展開され,現在では制御ユニットだけでも数十個のMPUが搭載され,センサや小形モータなどに内蔵されるものを含めると相当な数に上る.
排ガス・燃費などの環境対応は,内燃機関の性能向上のみならず電気自動車や燃料電池車へのパワートレインの置換など,地域ごと適応して進んでいくので,本稿では比較的世界共通に進むと考えられる冒頭の四つの本質機能に沿って技術を解説する.
①の安全については,まずは乗員保護の観点でエアバッグ,ABS(Anti-lock Braking System)などの装着が進み,その後重量の異なる衝突安全(コンパチビリティー)に対応し,これからは対歩行者加害性低減の開発が進んでいる.すなわち,個車の観点から社会インフラである道路を共有する全員の視点に開発が広がっている.また,②の快適については空調やAV(Audio Visual)機器などの車室内環境から,クルーズコントロール等の運転支援に進み,安全と快適を両立させる自動運転の議論がされている.③の“経済的”と④の“早く”に関しても,エンジンの燃費向上や車体の走行抵抗低減という個車の効率向上に加え,渋滞情報を提供して最適な経路を通過することで時間と燃料を節約する交通流制御の考え方が普及してきた.更には鉄道や航空機など他の移動体も含めて,社会全体で自動車の役割を割り当てて最適な解を得る動きが議論されている.例えば持続可能な開発のための経済人会議(World Business Council for Sustainable Development)では,ドイツ鉄道・メルセデスベンツなどが鉄道と自動車のマルチモーダルの社会実験を実施し,日本では2020年東京オリンピックをショーケースとして実証試験でデータを取り,社会全体で解を出す動きが出てきている.
個車から車両相互,更には道路交通社会全体での議論が進むにつれ,個車の動きを相互で情報共有したり,エリア全体での車両や歩行者を管理したりするための基盤技術として情報処理と通信が重要になってきた.
以下,情報系エレクトロニクスの視点で技術を展望してみる.
法規により全車装着されているエアバッグ(図1)の基本システムは,衝突加速度(G)検知用センサとバッグを膨張させるガス発生のインフレータから成っている.現在では,車両の複数部位に設置した電子式のGセンサ波形をECU(Electronic Control Unit)で解析して,正面衝突・側面衝突・オフセット衝突など,どんな衝突形態かを判断しこれに応じて複数部位に設置したバッグを最適なタイミングで膨張させるよう精密に制御している.
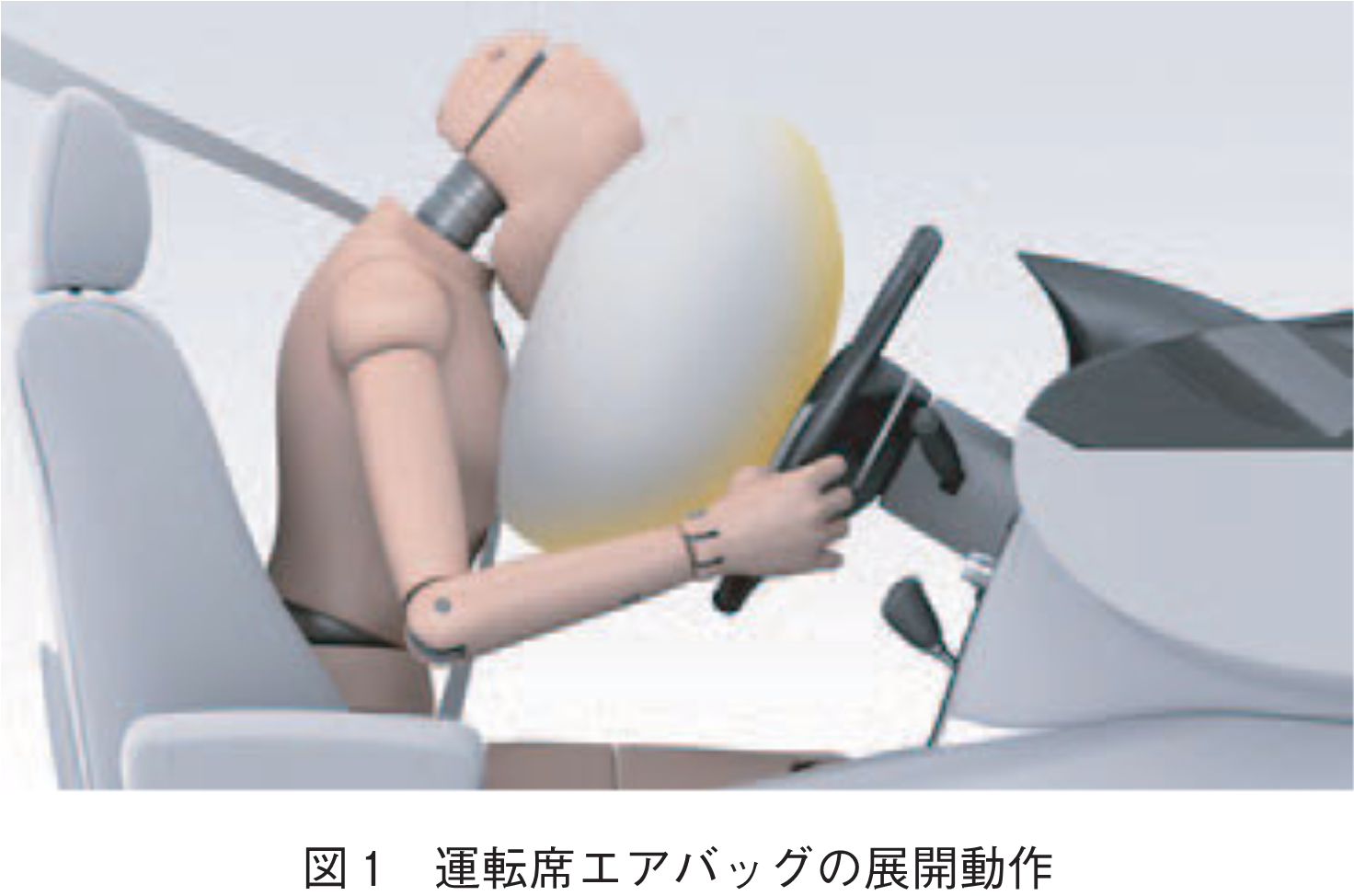
エアバッグの設計にあたっては,車両を衝突試験して実験データ計測を積み重ねる方法では非常に手間とコストが掛かるので,シミュレーションを活用する.センサへの衝突の伝達波形を調べる車体構造モデル,衝突による人体の動きを精密に求めるための人体モデル・シートモデルなどからバッグ展開の制御仕様を決める.その背景には,実際の事故をデータベース化してそれを統計処理した結果が重要な役割を担っている.今後も,エレクトロニクス技術を駆使して,一人でも多くの死傷者を救うシステムを開発するとともに,万が一のタイミングに確実に設計意図どおりに作動する信頼性の高い設計が必須である.
また,近年,対歩行者衝突用のエアバッグシステムを装着する車両が出てきた.車両前部に衝突した歩行者の多くが足をすくわれる形になり,結果頭をボンネットやフロントガラスに打ち付けて致命傷に至るので,その衝撃をボンネット上部やフロントガラス前に展開したエアバッグで緩和するシステムである.シートベルトによりある程度の動きが拘束されている車室内に比べ,衝突後の歩行者の動きは体格差の違いなどにより多様で,どのような体勢で車両のどの部位に衝突するか,予測は極めて困難である.現状はバンパーなどに埋め込まれたセンサによって作動するエアバッグを広い面積に長い時間展開することで衝撃を緩和しているが,今後更なる歩行者の被害低減を実現するためにカメラを使用して適切な時間に適切な形で展開制御するなど,測定を基にしたバッグの展開制御に進むと考えられる.
ABSは車輪速センサでタイヤの回転を感知し,油圧を制御して車輪のロックを防ぐことで,多くの路面で制動距離の安定化とステアリングでの事故回避を可能にするシステムである.エレクトロニクス技術の発展によって,人間では不可能な高い周波数でブレーキ圧を制御して車輪のロックを防ぐことが可能になった.更に,車輪速センサの波形を統計的に解析してタイヤ空気圧の推定などの予防的安全情報が付加機能として追加されている.またブレーキペダル踏力の急激な増加は緊急ブレーキと判断し,ポンプで強制的に油圧を増加させて限界制動までの時間を短縮することも実用化されている.今後,統計処理技術が進むと車輪速センサの波形から路面の摩擦係数推定や,更には車体のばね上振動状態などを推定することができるようになり,ヨーレートやステアリング切り角など他のセンサとの統合的な解析から車両のばね上振動を低減し車両姿勢を安定化させることが可能になる.このように,今後はドライバの負担を減らして疲れを低減するなど,車輪速センサは予防的な安全または安心の機能にも活用されていく.
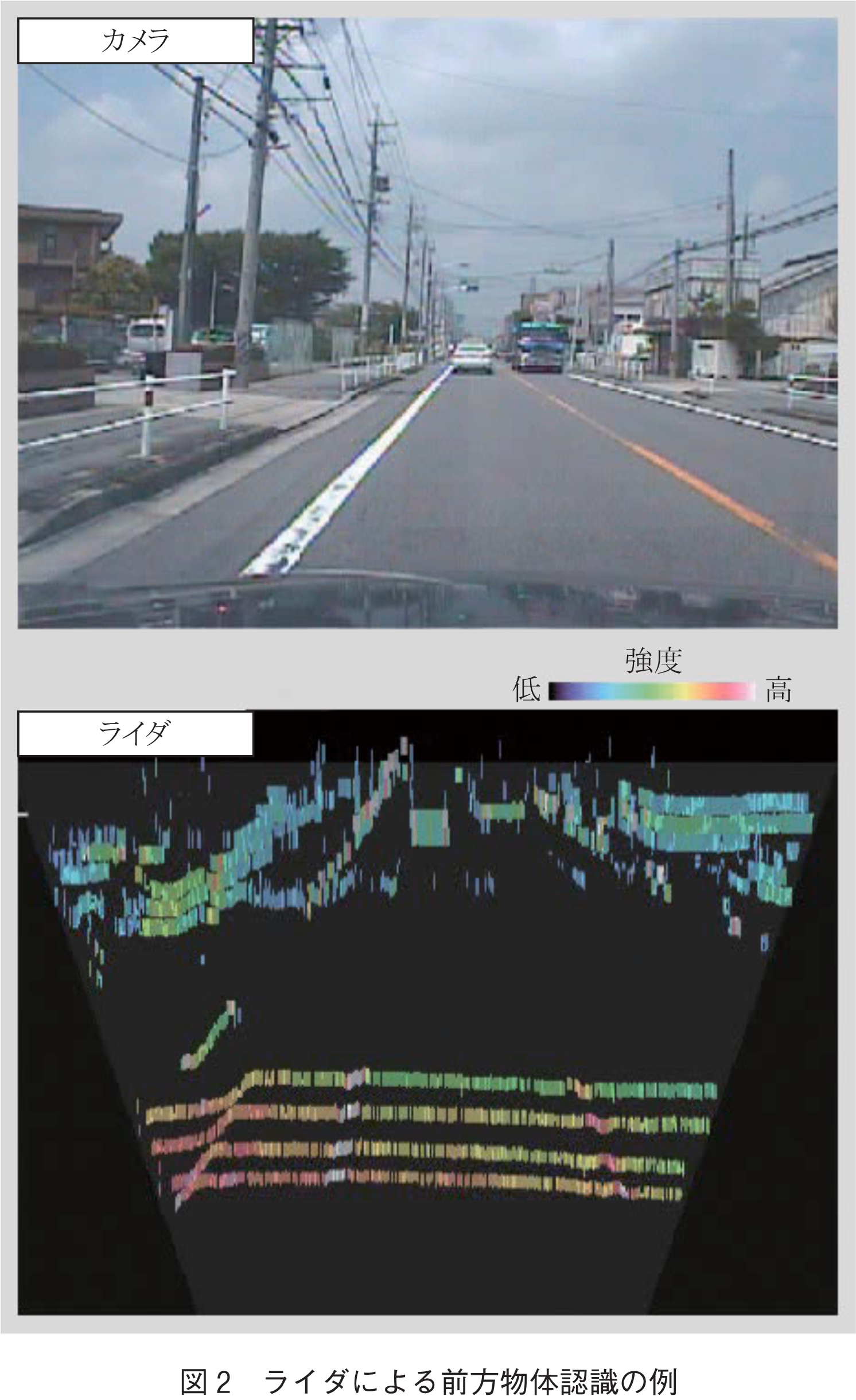
また,先行車への追突防止や横断する歩行者への衝突被害低減自動緊急ブレーキ(Autonomous Emergency Braking)も重要な開発である.先行車や歩行者を認識するカメラを距離計測にも用いる単眼カメラ方式,カメラを2個使うステレオ方式,カメラに加えて専用の測距センサとしてミリ波やライダ(Light Detection And Ranging)を併用する方式などでシステムが構成されている(図2).現在,NCAP(New Car Assessment Programme)でシステム性能要件が定義されているが,今後,実世界で起こり得る無数の衝突形態に対応して効果を向上させていくことが必要であり,事故データに対する統計技術の駆使や機械学習技術を活用した認識精度の向上が技術開発競争の焦点になっている.
安全の効果を更に向上させるため,他車との情報通信の活用も開発されている.例えば,先行した他車から路面情報を無線で受信し,あらかじめブレーキの与圧を高めたりパッドとディスクのクリアランスを詰めたりしてブレーキの効き始めを良くすることで,少しでも早く減速を可能にして損傷を低減することが見込まれる.
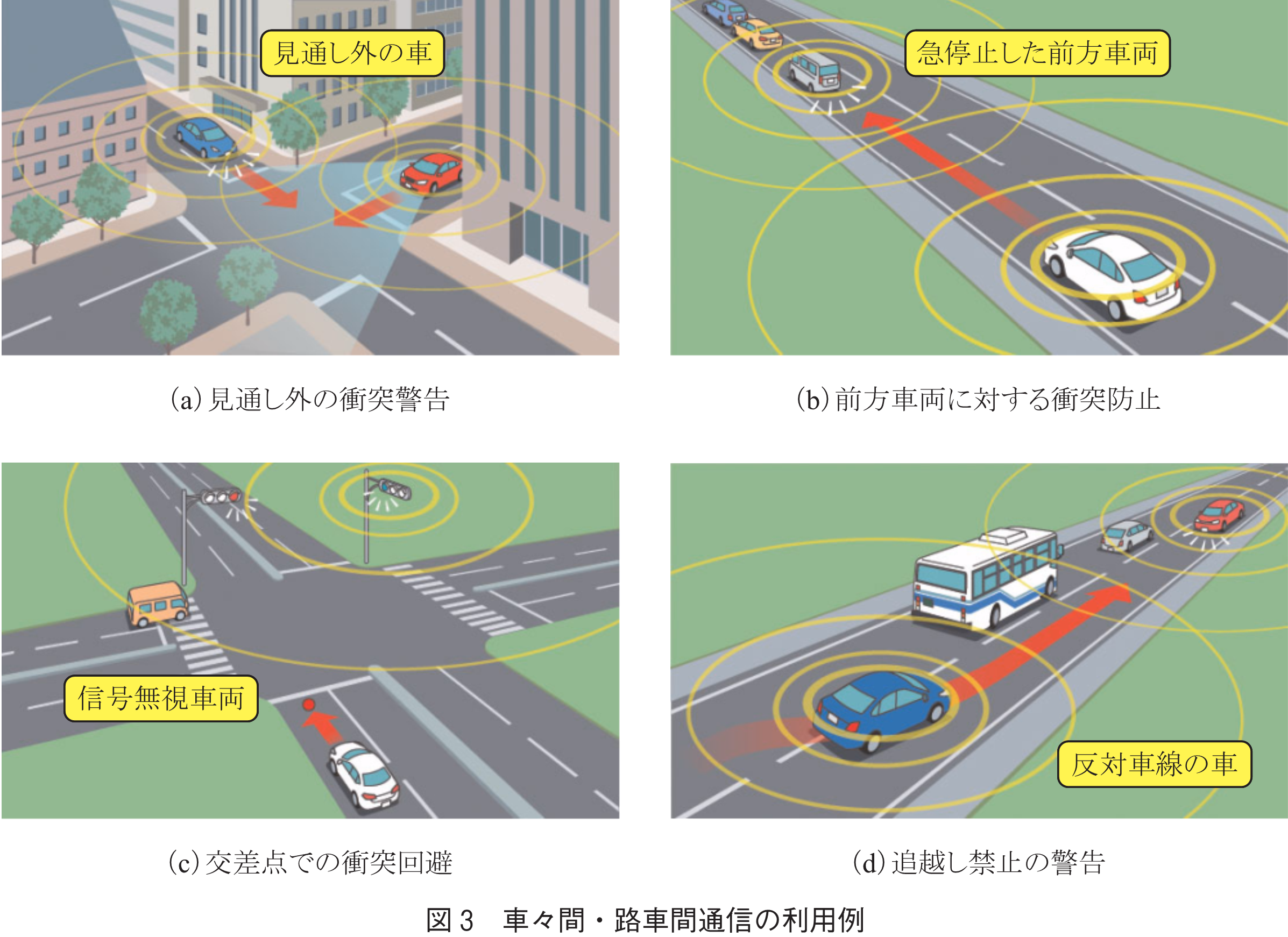
無線通信で外部からの情報を付加して予防安全システムの性能を大幅に向上させるシステム構成(図3)は,今後普及が加速される分野だけに,技術的にも確立していかなければならない内容が多い.通信の形態は,①車対車(V2V: Vehicle to Vehicle),②車対(路側)インフラ(V2I: Vehicle to Infrastructure),③車対情報センター,の3種類がある.
V2V及びV2Iの(狭域)通信システムは,日本及び米国ではIEEE802.11pの専用規格(通称WAVE: Wireless Access in Vehicle Environments)の整備が終わり,日本が世界に先駆け,2015年に製品化した.
(参考:ITS Connect推進協議会ホームページ https://www.itsconnect-pc.org/about_its_connect/service.html)
V2Vの安全システムは両方の車両に無線機が搭載されていることで実現が可能になるが,V2Iのシステムでは,インフラ側に画像センサ・ミリ波センサなどを設置することで,無線機を搭載していない車両や歩行者も対象にした事故防止の可能性が出てくる.いずれも車両への無線機搭載の普及が効果の実効値向上の鍵であり,米国ではWAVE無線機装着の義務化が検討されている.
一方,欧州では5Gセルラ網のエッジ通信機能を使用したV2V通信システムの技術検討途上である.専用無線機を必要とするWAVEのシステムに比較して,車対情報センターの通信に用いるセルラ網を共用することができるコストメリットがある.ただし,無線機同士で通信性能を担保するWAVEに比べ,5Gセルラ網のエッジ通信では通信事業者設置の設備も含めて通信性能を担保しなければならず,技術課題はより煩雑になる.
車対情報センターと車両が連携する機能は,車ごと個別に実施される通信をセンターが一元的に管理することで実現される.例えば,ある車両が車載カメラ等で路上の異常を検知し,位置情報とともにそれをセンターに上げて,センターではその場所を後に通過する他の車両に対してその情報を送信し,当該車両の予防安全動作につなげる.通信のユースケースとして,ブレーキやステアリング制御への介入を応用の視野に入れて規格を決めているWAVEに対して,セルラ網を使う車対情報センターの通信の場合は,前述した通信事業者の無線設備に加えて,交換機のシステム性能や情報提供センターでの処理時間,更には複数のセンター間基幹通信網での遅延など,ハードリアルタイム制御機能への応用のハードルは更に高くなる.エッジ通信規格の策定に加え,更に複雑になる通信の遅延とそのばらつきに関わる規格をどこまで策定できるのか,今後の動向が興味深い.
液晶ディスプレイ(LCD: Liquid Crystal Display)の車載は当初,高級車種へのアナログメータのサブ表示器として混載されることから始まったが,ナビゲーションシステムの普及に伴いAV機器とエアコンパネルの一体化,メータクラスタのLCD化へと拡大した.現在はインパネの表示器の多くが大画面のLCDパネルを利用するようになってきており,一つのLCDパネルに複数の情報を切り換えて表示している(図4).このように,ドライバへの情報提供デバイスとしてのLCDが当たり前になった背景には,輝度・コントラスト・視野角・低温での応答速度など,見栄えの質感向上につながる性能改善があった.一方で,表示性能で評価の高い有機EL(Electroluminescence)は,劣悪な車室内環境での寿命の課題からまだまだその座をLCDから奪い取るには至らない.

表示デバイスのディスプレイ化の一方で,表示情報の面積密度が高くなり,ドライバは画面の注視が必要になる.このとき,道路前方の遠視点からディスプレイの近視点までの焦点距離の違いが運転者への疲労負担につながっている.特に頭に近いリアビューミラーのLCD表示化は,数mの遠方視点から僅か20~30cmの近視点まで急な焦点移動が必要であり運転者に与える視覚疲労負担が顕著である.
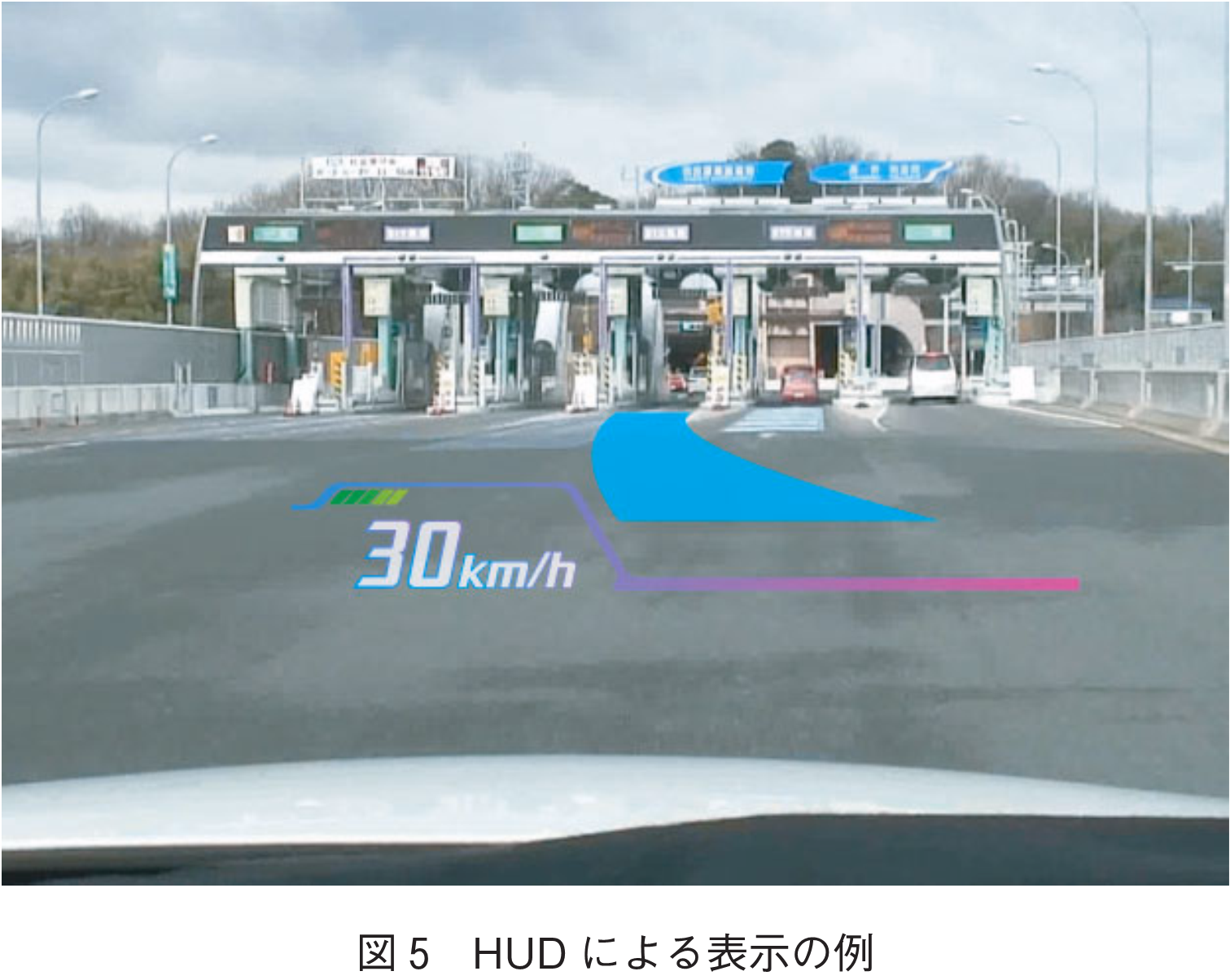
視焦点移動の疲労負担低減に対しては,遠視点に虚像を結ぶHUD(Head-Up Display)の効用が期待されている.大画面化に加え,輝度とシャープな結像の両立を目指して開発が進められている(図5).遠視点を実現するには光路長を長くすることが必要で,インパネ格納の制約から高度な光学設計技術が必要である.大画面化の技術解の一つとしてレーザ光をスキャンして虚像表示するタイプのHUDや,遠視点化の技術解として網膜に直接描画する表示装置も研究されている.乗員への情報提供のコアである表示デバイスは今後も止まることのない技術開発が続く.
安全と快適を両立させる技術としての高度運転支援技術開発が内閣府主導の戦略的イノベーション・プログラム「自動走行システム(SIP-adus)」で進んでいる.自動運転へのロードマップを描き,日本の自動車の世界的競争力を保つため,競争領域と協調領域を定義して業界を挙げて必要な技術開発を実施している.
(参考:SIP-adusホームページ http://www.sip-adus.jp/)
2017年度には今までの開発成果を大規模実証試験で確認することが計画されている.この中で,自動運転レベル2,またはレベル3と呼ばれる,基本的に運転者責任の運転(支援)システムにおいて,車と人との情報のやり取り(HMI: Human Machine Interface)と制御システムの二つの切り口で課題を述べる.
“表示”という視覚を用いてドライバに情報を伝えるHMIの技術は,従来はドライバが情報を「取りに行く(プル)」ときの性能に着目して開発を進めてきた.ところが,運転支援システムを安全に使うためには,システム側で対応できない状況になったときに車両から運転者に主権(注1)を返還するプロセスがあり,このプロセスでのHMIでは自動車側から「情報を伝える(プッシュ)」技術が重要になってくる.例えば,現状,自動運転レベル1と呼ばれるアダプティブクルーズコントロールやレーンキープアシストなどでシステム側が対応不能な運転環境になったときのプロセスの多くは,①警告音によって②運転者が前方車外からディスプレイに視線を移し,③表示されたシステム状態を④理解して,⑤必要な対処をする(運転者が主権を受け取る),という順番になっている.複数の支援が協調している自動運転レベル2以上では,どのシステムが対応不能になっているかを③及び④のプロセスで早くかつ正確に運転者に伝えることが重要である.このために,音や振動など人間の五感を活用し情報の内容を感覚的に(習熟をなるべく必要とせずに)かつ的確に伝え,運転者が十分対処できる時間を残したHMIシステムが必要である.1994年に名古屋空港で自動操縦とパイロットの操作が干渉して航空機が墜落した事故があったが,訓練された職業操縦士でもHMIに起因する対応操作のミスを起こす.運転支援システムの完成度が高まり運転者が機械を信頼するようになればなるほど,何らかの理由で機械が運転者に主権を返還するときや運転者が強制的に主権を奪回しにいくときの過渡状態で生じるHMIの問題は,一般の人が運転する自動車では航空機以上の考慮が必要である.このためには,機械から人に一気に主権を交代するのではなく,機能を階層化して段階的に機能を縮退し主権交代していく制御システム開発と,緊急時の人の行動に対する深い知見に基づいたHMIシステム技術開発が必要である.
これらを実現する制御システムについての今後の技術課題は,段階的機能縮退を可能にする判断系,すなわち“脳”の部分の開発とその判断の根拠になる情報収集系の開発にある.判断系の構造はHMIシステムの構造とも密接に関係し,ロボット制御アーキテクチャ,AI(Artificial Intelligence),ルールベース/スキルベース/ナレッジベース,多数決(多重判断),などのキーワードで産学官が活発な技術開発をしている.
一方で情報収集系は,情報の提供元の位置依存性と情報の時間的な価値劣化性(鮮度)で分類し,車載センサ・狭域通信・広域通信の三つに分けて収集し,それを活用する構造になっている.課題は,車載機や情報提供サーバの処理能力と通信系のQoS(Quality of Service)担保で,コストも含めいかに現実的なシステムとして実現するかにある.リーズナブルなコストで市場に広く普及させるため,先端技術開発に加え信頼性を確保するための技術開発の課題は尽きない.
日本では世界に先駆けて路側機による交通情報収集と放送や無線通信による情報提供の仕組みを構築し,既に日本道路交通情報センター(JARTIC)やVICS(Vehicle Information and Communication System)が正確性の高い交通情報を運転者に向けて提供している(図6).

一方で,Googleは,スマートフォンの位置情報を集め,これを情報処理して道路の渋滞情報をスマートフォンの地図上に提供している.いずれも,運転者の観点からは,現在の状況より自分がそこを通過するとき(未来)の情報が知りたいニーズがある.例えば,ナビゲーションで走行しておれば,自車位置と今後の走行経路を交通情報提供元に送付し,それに見合った(個別の)渋滞予測が提供されると有難い.情報提供の分野では,ブロードキャストから一対一の情報提供,現在情報から未来予測情報を実現する技術開発が期待される.この分野は高度運転支援システムの情報提供センターに進化していく.
冒頭に述べた,自動車の本質機能である,「安全に」,「快適に」,「経済的に」,「早く」,の四つの観点で,鉄道と自動車など複数の交通手段を組み合わせるマルチモーダル(注2)を考えてみる.マルチモーダルは現状,①公共交通網の発達している都市部での道路渋滞の解消,②観光客や過疎地高齢者など公共交通網が未発達にも関わらず自家用車を利用できない地域の移動手段,の二つの切り口から検討が進んでいる.いずれも公共交通網の終端から最終目的地や個人の家庭までをつなぐ移動(ラストワンマイル=LOM)(注3)は共通の課題である.①の施策では,基本的な方策は自宅を出た自家用車を駐車場に置いて公共交通に乗り継ぐパークアンドライドであり,航空機・鉄道・バス等への乗り継ぎを組み合わせて自家用車の利用を局所化し,最終目的地への自家用車の集中を緩和する場合が多い.最終目的地がイベント等,共通の場合LOMはシャトルバスが利便性の高い解となるが,ユーザ個別の目的地がある場合はLOMはライドシェア(レンタカー含む)またはタクシーになる.いずれも,駐車場や乗り換え場所などのインフラの整備と情報技術を駆使した乗り換え(待ち)時間を「早く」する(短くする)ロジスティックスが開発要素であるが,ビジネスモデルは共通目的地の場合は比較的容易に成立し,2020年オリンピックは格好の実験場と考えられる.
これに対し,②の場合は,地域ごとに公共交通状況も利用の形態も異なり,一元的な解にはならない.タクシー利用が交通システムとしての一つの解であるが,利用者の利便性と事業者の経済合理性の不一致が課題になっている.特に,過疎地の場合はタクシー運転者が確保できず(人材不足面と稼働率不足による経済面の両方で)利用者の利便性の向上に限界がある.この解として,住居の近くまで無人で移動するモビリティの研究が省庁や地方自治体の主導で進んでいる.運転支援のロードマップの延長の技術開発とは異なり,管制による遠隔制御を利用する方法のほかに,自動ゴルフカートや工場内の無人搬送機のようにあらかじめ決められた専用ルートを低速で走行する方法など,地域ニーズごとに適した乗り物を利用する,地域特化型の開発になっていくと予測される.例えば,沖縄ではバスを使った実証試験を実施している.
(参考:SIP-adusホームページ http://www.sip-adus.jp/evt/okinawa-trial/ )
これらの動きから自動車産業界の構造変化も垣間見える.例えば,車体と架装を分離し架装業者は複数メーカの車体を扱うトラック業界のモデルのように,自動車メーカから車両を調達しサービスや納入先に応じて追加改造して事業者に供給する事業形態が広まるのではないだろうか.また,このような生産エコシステムを前提にした生産管理システムや,スマートフォンやタブレットをツールにしてユーザに移動のニーズが生じたときにL.O.M. を担う乗り物を配車する等の情報システムなどは,自動車業界・通信業界・サーバ業界などの大企業ではなく,地域密着の中小企業が主役で個別のエコシステムを形成してサービスを提供する時代に変わっていくであろう.既に米国などで話題になっている後付け自動運転装置を開発しているベンチャーは,このようなビジネスモデルへの対応を視野に入れている可能性は高い.
およそ20年前,海外の論文に「自動車メーカにとってエレクトロニクス製品の購入額が総原価の20%を超えることは許容できない.」との記載があった.その当時,数十万円したナビゲーションシステムは現在1/10の価格で手に入れることができる.新機能開発の一方で,カーエレクトロニクスの飛躍的拡大の背景には多大なコスト低減努力があったことを忘れてはならない.
近年,自動車は個人所有のプライベートな移動手段より,公共で活用する移動手段の側面がクローズアップされてきている.今後は,更なる技術進化により新たなモビリティ社会が生まれ,車もますます多様性を帯びてくる.これをけん引するカーエレクトロニクスは,今後も大きな進化を遂げ,自動運転に代表される次世代の技術が現実のものとなり,各社の技術開発競争はますます激化の一途をたどっていく.一方で,使用可能な技術を早く見極め実用化して,地域ニーズなどたとえ限定的少量でも素早く社会に貢献する努力も大切である.
自動車は今後,最終製品の姿のみならず,製造工程の途中から部品としてサービス業者に納入されるビジネスモデルも生まれる.エレクトロニクス技術の特長である,“短期開発”のDNAを生かして,新しいビジネスモデル・新しいエコシステムで,素早く社会に貢献していきたい.
最後に,本内容を執筆するにあたり図表等の掲載を快諾して頂いた方々,御意見を頂いた方々に,誌面をお借りして御礼を申し上げます.
(平成29年3月30日受付 平成29年4月18日最終受付)
(注1) 本稿表記の主権とは,運転操作の実行と責任の所在を言う.
(注2) 交通におけるマルチモーダルとは,利用者のニーズに効率的で良好な交通環境を提供するために,複数の交通機関の連携を通じて解を提供することを言う.
(注3) 交通におけるラストワンマイルは,基幹交通システム(鉄道・バス等)と自宅や目的地との間を結ぶ地域内交通手段を言う.端末交通システムとも呼ばれる.
続きを読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()