|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|

abstract
徐々に社会に浸透しつつある生活支援ロボットとして,移動ロボット,パワーアシストロボット,コミュニケーションロボットなどを取り上げ,製品化事例と今後の展開などの紹介や分野ごとのエレクトロニクスに対する期待について述べる.人間生活環境で動作するロボットには,小形軽量モータや大容量バッテリーなど各分野に共通する期待もあるが,今後より高度なサービスを提供するためには,環境認識を支える外界センサやインタフェース技術の高度化,クラウド活用のための通信技術の高速化・最適化,システム全体としての効率化などにも期待したい.
キーワード:生活支援ロボット,移動ロボット,パワーアシストロボット,移乗支援ロボット,コミュニケーションロボット
近年,家庭用掃除ロボットやコミュニケーションロボットなどの生活支援ロボットが家庭内や生活環境に入り込みつつあり,徐々に社会に浸透してきている.本稿では,今後ますます我々の身近な存在になることが予想される生活支援ロボットやそれを支えるエレクトロニクスについて論じる.ロボットにとってのエレクトロニクスとは,2005年に経済産業省製造産業局において設置されたロボット産業政策研究会におけるロボットの定義(「センサ」,「知能・制御系」及び「駆動系」の三つの要素技術があるもの)に準じ,センサ,計算機,アクチュエータ(含,ドライバ),更にはそれらを結ぶ有線・無線通信やバッテリーなどを想定する.また,ロボットは多種多様であるため,本稿において対象とする生活支援ロボットについて,まず始めに整理しておきたい.
2008年の同研究会において今後実用化が期待されるロボットについて,コミュニケーション型,移動作業型,人間装着(密着)型,搭乗型,汎用型の5タイプに分類された.本稿では,2.において移動作業型と搭乗型を,3.において人間装着型を,4.においてコミュニケーション型と人間密着型を取り上げ,製品化等の現状と今後の展開やエレクトロニクスへの期待について論じる.筆者らの専門性から,2.は松本 治,3.は吉田英一,4.は松本吉央が執筆担当した.なお,古くから市場化されている産業用ロボット,近年普及が加速的に進んでいるドローンなどに関しては誌面の都合上,本稿では扱わないこととする.
本章では移動ロボットとして,掃除ロボットのように人の代わりに動いて作業する移動作業ロボット,人の移動を支援する搭乗型ロボットと歩行支援ロボットに関して,開発や製品化の現状とエレクトロニクスに対する期待について論じる.
移動作業ロボットには,例えば災害対応ロボットのように人間が入り込めない場所において作業や情報収集を行うロボット,掃除ロボットや案内ロボットのように人間共存環境において作業や誘導をするロボット,搬送ロボットのように物を運搬するロボットなどが代表的な開発事例である.図1にアマノ株式会社製の業務用清掃ロボット(1)を示す.

ルンバのような家庭用掃除ロボットは既に普及しており,各社こぞって製品化を競っている.価格も数万円以下まで下がっており,くまなく設定エリアを清掃する機能の信頼性も高く,製品としての完成度は高い.一方で,案内や業務用の清掃など,目的地までの到達や設定軌道に対する追従など,作業を行う上でより高度な自律性が求められる移動作業ロボットについては,まだ開発の余地が残されている.工場内で普及している無人搬送車の誘導ケーブルや白線,マーカなど,環境側に手を加えることが許容されるアプリケーションでは高信頼な自動走行技術が確立されているものの,それが許容されない環境での自律走行技術はいまだ研究開発が必要な領域である.自動車の自動運転に必要とされる技術に近い.現状ではレーザスキャナを活用した二次元や三次元の環境地図ベースの自律移動技術が有力であり,既に製品化事例も出つつある.図1の清掃ロボットもその一例である.
センサとしては環境地図を構築するための外界センサが必須であるが,現状広く使用されているレーザスキャナは高価である.二次元で測距距離が数mのものでも10万円程度,数十m届くものは数十万円である.更に,三次元のタイプで数十m届くものは100万円以上であり,製品に搭載しようとしてもコスト面の問題が大きくのし掛かる.その多くはレーザ光源を放射状に反射させるためのミラーを高精度かつ高速回転させる機構が必要であり,この機構をなかなか安価に構成できないのが価格面での障害になっている.MEMS技術を使うことでコスト削減を図る製品も見受けられるが,検知範囲が狭いなどの根本的な問題を抱える.ロボット側からは,安価でかつレーザ本数の多い全方位3Dレーザスキャナの開発が進むことを大いに期待したい.また,カメラにより同様のレベルの3D環境構築ができると低コスト化が飛躍的に進むと考えられるが,RGBよりも検知帯域の広いマルチスペクトルカメラ,32Kや64Kレベルの高解像度カメラなど,屋内外使用可能でかつロバストな環境検知を可能とするビジョンセンサの普及についても期待したいところである.
一方で,今後情報量がますます膨大になることが予想される3Dセンサ情報をロボット自体で処理するというよりも,無線通信を使ってクラウドで実時間処理する方向性も考えられる.そのためには,通信レートの高速化,通信情報量の大容量化に加えて,ロボットからクラウドへの上り側処理情報量の割当を増やすなど,ロボット側の計算コストを下げる仕組みについても,ロボットの台数が増えると全体としての低コスト化につながるため,その実現に期待したい.
搭乗型ロボットとは,一人乗り型の移動支援ロボットである.大別するとセグウェイのような立ち乗りロボット,知能車椅子のような座り乗りロボットの2種類が存在する.図2に立ち乗りロボットであるトヨタ自動車製のウィングレット(2),座り乗りロボットである産業技術総合研究所の自律走行車椅子(3),(4)を示す.これらは国内の現行法の下では公道走行が認められておらず,製品化のボトルネックは技術的な課題というよりも,法規制の問題の方が大きく,法律が改正されないと大きな市場に育つことが難しいのが残念なところである.

この搭乗型ロボットについては,人が乗るため搭乗者の認知判断能力や操縦能力にある程度依存することができる.自動走行機能を付加する場合は,2.1で述べた自律移動ロボットと同様,外界センシングのコスト面などの問題が障害となるが,例えば安全機能としての単なる障害物検知・停止であれば最近の自動車に搭載されている技術を転用することで安価に実装可能である.立ち乗りロボットの基本的な制御技術である姿勢安定化制御にしても,高信頼化のためには多重系にする必要はあるものの,安価な加速度計やレートジャイロ,マイコンレベルの計算機で実現可能である.電動の乗り物一般に言えることではあるが,バッテリーの持ちの問題,特にウィングレットのような小形・軽量を特徴とするモビリティにとっては,バッテリーを含む駆動系の軽量化と1回の充電による航続距離を伸ばすことのトレードオフの関係をどう両立させるかが大きな課題である.バッテリーの高エネルギー密度化や小形・軽量アクチュエータ技術の飛躍的な向上に大きな期待を寄せるのがこの形態のロボットである.
歩行支援ロボットとは,高齢者等を対象に普及している福祉用具である歩行車やシルバーカーの電動アシスト機能が実装された機器である.開発の方向性としては,既存の歩行車やシルバーカーの一部の車輪をモータ駆動にし,使用者のハンドル部に掛かる力や路面傾斜などのセンシングにより,上り坂ではアシスト力を,下り坂では制動力を適切に発生する機能を付加するというものである.図3にシルバーカー型であるRT.ワークス株式会社製のRT. 1(5)と歩行車型である(株)幸和製作所のリトルキーパスS(6)を示す.

これら歩行支援ロボットは歩行補助車等とみなされ,歩行者扱いでの公道走行が認められている.更に,歩行車型は介護保険給付対象となっており,通常の1/10の価格でレンタル可能なことから,現在上記2社を含む3社から販売され,普及が進みつつある.
現在の歩行車型の歩行支援ロボットは,後方の2車輪をモータ駆動にしている.既存歩行車は軽量であることから,例えば段差を乗り越える際には基本的には人の操作により後輪接地のまま前輪を持ち上げる.そのため,全体の重量を軽量に抑えることが必要であり,既存の歩行車の重量が約5kgであるのに対し,各社共にバッテリー込みで10kg以下に抑えている.既存福祉用具と同様の取り扱いを実現するためには,更なる駆動系の軽量化に期待したいが,あくまでもアシストであるため,バッテリーが切れた場合でも少し操作が重くなるものの,歩行が継続できるという点が搭乗型ロボットとは本質的に異なる点である.また,センサについては測距センサによりユーザと機器が一定距離離れると安全のために機器を停止させる機能(セパレートブレーキ)を持つものがカワムラサイクル株式会社から販売されているが,より精密な人・機器間の距離センシングのためには,2.1で述べたような外界センサの低コスト化を含む高性能化に期待したい.
(松本 治)
本章では,装着型のパワーアシストロボット,特に最近開発が進んでいる腰補助パワーアシストロボットを支えるエレクトロニクスへの期待について述べる.
工場や流通,建築,農業,介護等の現場では,慢性的な人手不足や労働人口の高齢化により,作業の負荷が増大しており,作業者の労務・健康管理の重要性はますます高まってきている.作業に起因する腰痛その他の身体的不調の予防のため,作業の負担自体を軽減することが喫緊の課題となっている(7).
最新のロボット工学技術,実装・制御技術の進展に伴い,パワースーツ,あるいはアシストスーツと呼ばれる,人間が装着することで人間の運動能力を増強したり,補助したりする機器の開発が国内外で盛んになっている.近年,特に日本では,得意とする分野であるロボット工学の技術ポテンシャルを活用し,動力を備えた装着型ロボットの開発が進められている.2014年以降,日本においては(株)イノフィス製のマッスルスーツ(8),CYBERDYNE株式会社製のロボットスーツHAL作業支援用・介護支援用(腰タイプ)(9),(株)ATOUNのATOUN MODEL A(10)が製品化されている(図4).

これらの装着型パワーアシストロボットの特徴は,人間がロボットを大腿や腰,肩などにベルト等で装着し,ロボットの各種アクチュエータが発生する力により人間の動作を支援することである.ロボットは目的に応じて効果的に支援力を伝達するように設計された機構を有し,アクチュエータの出力は,これを介して人間に作用する.人間に密着して動作することから,このようなロボットには,安全かつ効率的に人間の動作を支援する制御システムが求められる.これを支えるエレクトロニクスへの要求事項は以下のとおりである.
(1) アシスト力を最適化するアクチュエータ制御
(2) 人間をリスクから守る安全な動作の確保
(3) 小形軽量化実装による快適性の実現
(1)は,人間が介護や持ち上げの作業を行う際,センサやインタフェースを用いて使用者の状態や意思を検出し,作業の負担を減らしつつスムーズな動作を実現する制御システムへの要求事項である.図4に示したロボットのうち,空気圧の人工筋肉で動作するマッスルスーツは,作業者の両手がふさがっていても,持ち上げ動作にタイミングを合わせてアクチュエータを駆動できる呼気インタフェースを備えている.またHALとATOUN MODEL Aはそれぞれ生体電位,姿勢センサを用いて作業者の動きを検出し,モータを適切に制御して支援力を発生する.(2)は,過大なアシスト力の発生や電源・動力の喪失等,様々なリスクに対応して作業者の安全を確保するシステムへの要求である.(3)は,人間が装着するシステムである以上,性能の最適化と安全要求を満たしつつ,駆動エネルギー源も含めたエレクトロニクスの小形軽量化実装に期待するものである.
既に述べたように,図4に示す装着型パワーアシストロボットは製品化されており,エレクトロニクス面での完成度は既に高いレベルにある.今後は,各項目の機能を更に高度化し,装着型機器としての高い安全性を担保しつつ,個々の使用者の動作履歴や傾向を考慮した支援最適化,エレクトロニクスとセンサ・アクチュエータの統合による一層のコンパクト化・効率化を期待したい.
一方,このような支援ロボットの普及に伴い,腰補助用装着型身体アシストロボットの日本工業規格JIS B 8456-1の制定が進められている.これは,人間型ロボットによるアシスト機器の定量的評価手法(11)を応用し,身体アシストロボットのアシスト力や腰部圧縮力低減効果の性能基準を与えるものである.エレクトロニクス開発の進展と工業標準の制定を両輪として,パワーアシストロボットの普及が加速し,本章冒頭で述べた様々な社会問題への解決の一助となることを望んでいる.
(吉田英一)
本章では,近年普及が進んでいる介護支援ロボットや生活支援ロボットのうち,前章までで紹介した移動機能を持つロボット,及びパワーアシスト機能を持つ装着型ロボット以外のロボットについて,開発や製品化の現状とエレクトロニクスに対する期待について論じる.
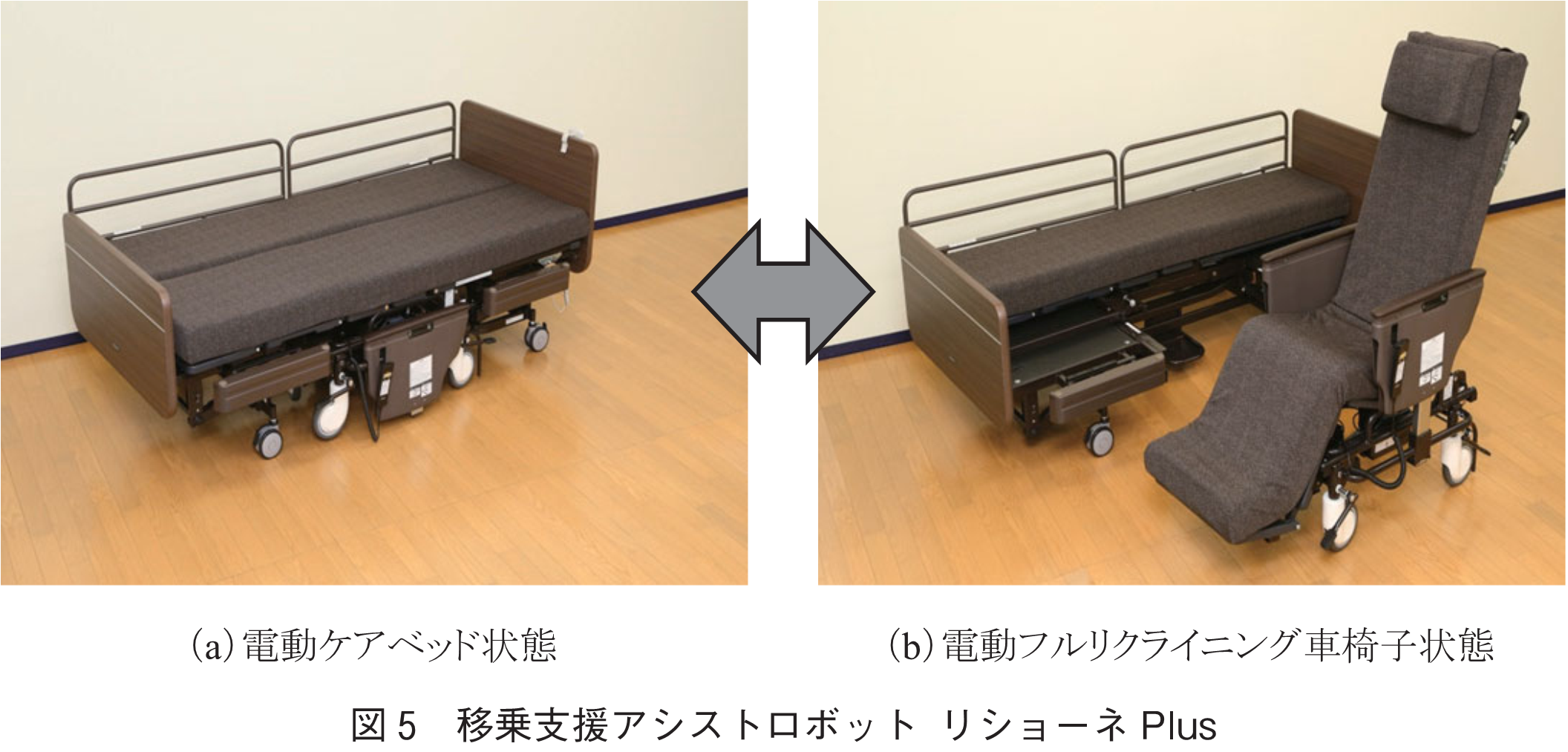
介護の中で,ベッド,車椅子,トイレ等の間の移乗は重要でかつ介護者の負担が大きい動作である.その負担軽減には,前章で紹介した装着型のロボットにより介護者の持ち上げ動作のパワーアシストを行う以外に,機器により介護者を持ち上げる方法がある.介護リフトをはじめとした移乗支援機器の利用は,イギリス,オーストラリア,北欧などの国々では一般的になっているが,日本ではまだ十分に活用されているとは言えない.従来の介護リフトとは異なり,体の前面で体重を支えながら移乗を支援する機器としては,富士機械製造株式会社製のHug(12)が開発,事業化された.また,ベッドが車椅子に変形することにより移乗自体を不要とするパナソニックエイジフリー株式会社製の離床アシストロボット「リショーネPlus」(13)も事業化されている(図5).これらの機器は人の身体全体を支持する必要があり,少なくとも100kg程度の体重を支持できる小形・高出力・高信頼のモータや機構が不可欠である.また,繰り返し充電しながら使用するため,小形・軽量・長寿命のバッテリーも運用上重要である.
上肢を動かすことができない障害者が,物を拾う,コップを口元へ運ぶなどの把持動作を指先操作で実現できるロボットとしては,カナダKinova社(14)が開発した生活支援用アームJACO(図6(a))がある.また把持機能のうち,食事機能に絞ったものとしてはセコム株式会社製のマイスプーン(15)やスウェーデンBestic社(16)製のBestic(図6(b)),また読書支援に絞ったものとしては(株)西澤電機計器製作所製の自動ページめくり器「ブックタイム」(17)がある.

これら把持動作を行うロボットでは,小形軽量にするためのモータ技術や,人との接触を検出するなど安全機能のためのセンサ技術が欠かせない.また将来的には人の顔位置に合わせた動作の調節や,重度障害者でも利用できるようにするためのBMI(Brain-Machine Interface)等のインタフェース技術の実現が期待される.
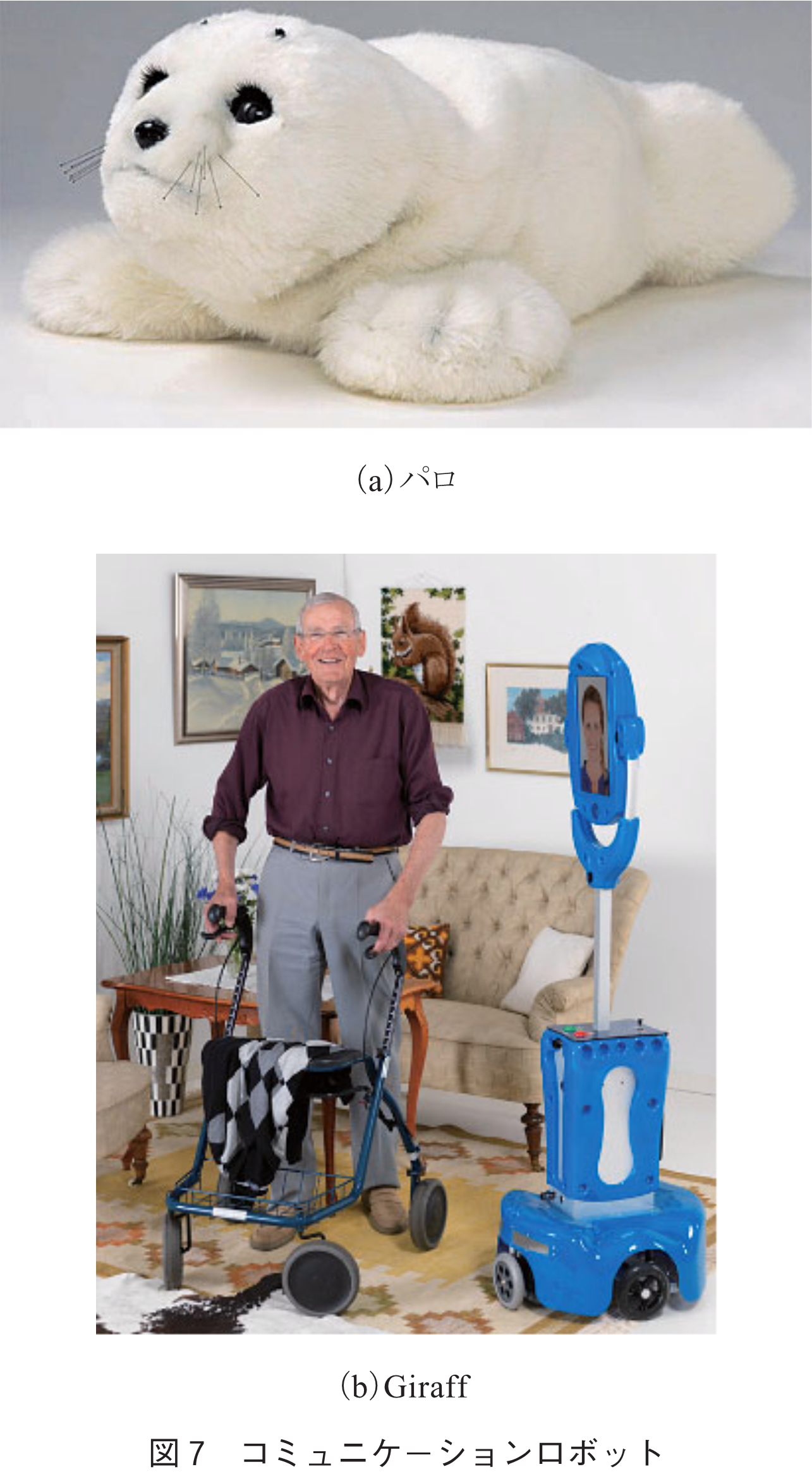
コミュニケーションロボットは,精神的な“癒し”,遠隔地にいる人との対話,など様々な目的のものが開発されている.例えば,産業技術総合研究所で開発されたアザラシ型ロボット「パロ」(18)(図7(a))は,動物と比較して清潔,安全で,かつ利用者のストレスを軽減するなどの効果も認められ,世界中で利用が進んでいる.またスウェーデンGiraff Technology社(19)製のGiraff(図7(b)は,遠隔の医師などとの会話を行うために開発されたロボットで,ヨーロッパでの導入が始まっている.
これらのコミュニケーションロボットには,今後は対話相手のより詳しい状態を認識するためのセンシング機能(顔認識,音声認識,動作認識,感情認識,接触認識等)の高度化が期待される.またコミュニケーションロボットの多くはバッテリー駆動が前提となるため,自動充電,小形・大容量のバッテリーによる稼動時間の延長だけでなく,将来的には無線給電による無制限な稼動の実現にも期待したい.
(松本吉央)
本稿では,各種生活支援ロボットについて,特に製品化されているものを中心に取り上げ,エレクトロニクスへの期待について述べた.小形軽量モータや大容量バッテリーなど,各ロボットに共通する期待もあるが,環境認識を支える外界センサやインタフェース技術の高度化,クラウド活用のための通信技術の高速化・最適化,システム全体としての効率化など,ロボットの種類に応じた個別の要求もある.ロボット開発者・研究者はあくまでも要素技術のユーザやインテグレータであるため,生活支援ロボットの更なる普及に向けて,エレクトロニクス技術の進化にますます期待したい.
(1) アマノ株式会社,
https://www.amano.co.jp/Clean/products/robot.html
(2) トヨタ自動車株式会社,
http://www.toyota.co.jp/jpn/tech/personal_mobility/winglet.html
(3) M. Yokozuka, Y. Suzuki, N. Hashimoto, and O. Matsumoto, “Robotic Wheelchair with autonomous traveling capability for transportation assistance in an urban environment,” Proc. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2234-2241, 2012.
(4) 松本 治,“産総研のスマートモビリティに向けた取り組み,”日本ロボット学会誌,vol.33,no.8,pp.11-14, Oct. 2015.
(5) RT.ワークス株式会社,
https://www.rtworks.co.jp/
(6) (株)幸和製作所,
http://www.tacaof.co.jp/
(7) 山田陽滋,工藤直紀,鮎澤 光,吉安祐介,吉田英一,“腰部負担評価のための基準データとシミュレータ,”日本ロボット学会誌,vol.34, no.4, pp.244-248, May 2016.
(8) (株)イノフィス,
https://innophys.jp
(9) CYBERDYNE株式会社,
http://www.cyberdyne.jp/products/HAL/index.html
(10) (株)ATOUN,
http://activelink.co.jp/
(11) 吉田英一,遠藤 維,多田充徳,吉安祐介,鮎澤 光,松本吉央,本間敬子,梶谷 勇,“ロボット介護機器の力学的効果評価―デジタルヒューマンとヒューマノイドを用いた定量的評価―,”第32回日本ロボット学会学術講演会予稿集,RSJ2014AC2N2-02, 2014.
(12) 富士機械製造株式会社,
http://nfa.fuji.co.jp/products/Hug/
(13) パナソニックエイジフリー株式会社,
http://sumai.panasonic.jp/agefree/pickup/resyoneplus.html
(14) Kinova社,
http://www.kinovarobotics.com/
(15) セコム株式会社,
https://www.secom.co.jp/personal/medical/myspoon.html
(16) Bestic社,
http://www.bestic.se/
(17) (株)西澤電機計器製作所,
http://www.nisic.co.jp/products/assistive/booktime.html
(18) (株)知能システム,
http://intelligent-system.jp/
(19) Giraff Technology社,
http://www.giraff.org/
(平成29年3月30日受付 平成29年4月19日最終受付)

続きを読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()