|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
abstract
私たちのQOLを高度化するためにロボットは大きな貢献が期待されている.しかし,従来のような位置や軌跡の追従のみを実現するだけでは接触を伴う作業の支援は困難である.なぜならば,このような接触を伴う作業には力触覚が不可欠だからである.本稿では力触覚伝送の原理とそれを実現するハプティクス技術の基礎,及びQOLを高めるための幾つかの応用例を示し,これらが次世代社会の鍵技術であることを示す.
キーワード:ハプティクス,医工連携,力触覚伝送,QOL
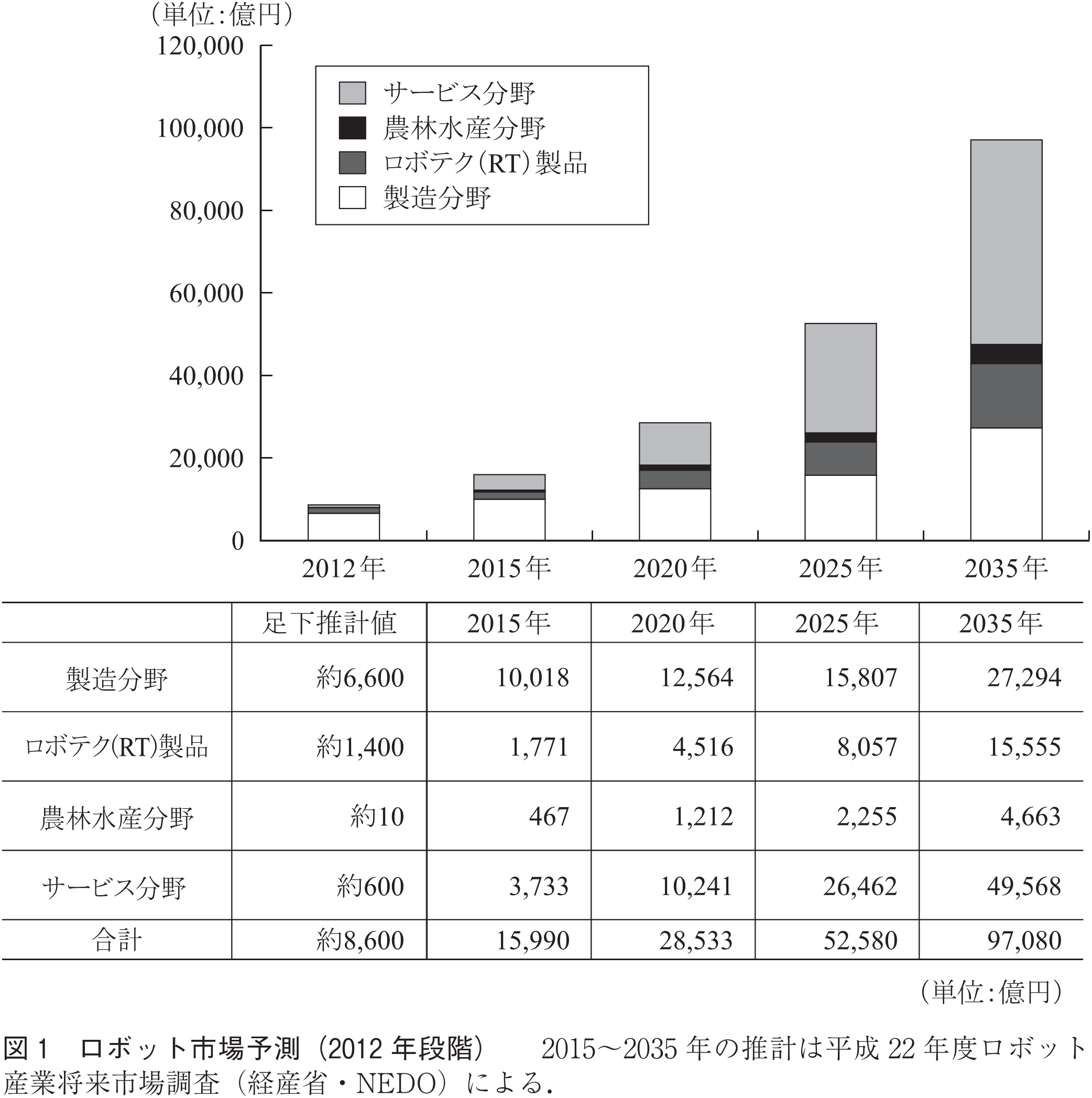
人間の五感のうち聴覚は19世紀に電話で,視覚は20世紀にテレビジョンでそれぞれ人工的に伝送することに成功した.それに対し力触覚は20世紀半ばから研究が始まったものの,なかなか人工的に伝送することに成功しなかった.一方で,21世紀になり介護,看護,医療などを中心に動作や行動を伴う人間支援の人工実現への要望が高まってきた.これは少子高齢化の進む日本においては,若年層は人間支援より生産活動に従事して経済発展に寄与すべきであるという背景があるからである.そのため,ロボットないしは人工的な人間支援システムを少子高齢化社会に実装することは今後の社会の発展に必須であると考えられるようになった.実際,政府もロボット革命実現会議を発足させて,2015年にはロボット新戦略が公表されている(1).このようなロボットはサービスロボットと呼ばれていて,繰り返し作業と位置決め作業を主とした産業用ロボットとは区別されている.図1は経済産業省が2012年に発表したロボット市場予測で,2012年で約600億円のサービスロボット市場が2020年には1兆円市場を形成するという(2).実際には家庭や病院でのサービスロボットの普及はそこまでの規模ではないと考えられる.
これはなぜであろうか.もし,サービスロボットと産業用ロボットの間に技術的に大きな違いがないとすれば,サービスロボットの普及が進まないのは価格や適用分野が少ないからであろう.しかし価格で言えば,米国Rethink Robotics社(3)のBaxterというロボットは自動車1台程度の2万5,000米ドル程度であると言われており,全く手が出ないほどの価格ではない.むしろ,私たちが期待しているサービス作業をこなすことができない点に普及を妨げている問題が存在していると考えられる.
私たちの身近においてQOL(Quality of Life)の高度化に従事すると考えられるロボットは私たちあるいは私たちの周りにある対象と接触しながら作業を行うことが不可欠である.このような接触を伴う作業は力触覚なしに実現することは困難である.これは,耳を塞いだまま(つまり聴覚を遮断して)電話で会話を行ったり,目を閉じたまま(つまり視覚を遮断して)テレビの映像を楽しんだりすることが困難であることと同じである.つまり,力触覚を遮断して接触作業を行うことは本来不可能なことであり,それが原因でロボットなどの人工的手段でQOLの高度化が実現できないのである.現在の産業ロボットは主に空間内の指定点に次々に到達するPTP(Point-to-Point)制御または先端(あるいは手先効果器)の空間内における指定軌跡を追従していくCP(Continuous Path)制御が主体であり,物体との接触作業は補助的な手段を併用して簡単な作業においてのみ実現されている.それはひとえに産業用ロボットに力触覚が備わっていないからである.今後,少子高齢化の進む世界において人工的な手段でQOLを高度化していくことは必至であり,そのためには力触覚を備えたロボットが欠かせない.今後,人間の動作や行為が記録され,それを人工物で再生することで実質的な労働力を人工的に増やすことが求められるであろう.力触覚伝送を実現するハプティクス技術は21世紀に必要な鍵技術であるゆえんである.
私たちが扱うシステムは,のこぎりや金づちのようなエネルギー源を持たない,いわゆる受動的な道具ではなく,システム内部にエネルギー源を持ち,アクチュエータが駆動されて様々な能動動作が可能になるシステムである.このような能動システムにおけるエネルギー源は双対な可制御変数ペアであり,例えば電気回路では制御電圧源と制御電流源であり,メカトロニクスのような人工的な機械システムでは制御速度源と制御力源になる.ロボットなどの場合ではアクチュエータが電動機の場合,理想的な速度制御下にある場合はその電動機は制御速度源素子に,逆に理想的な力制御(あるいはトルク制御)下にある場合は制御力源素子となる.この二つは表1に示すように,互いに正反対の性質を有する.

この表に示すように,速度制御(あるいは位置制御)では制御剛性(以下,剛性と略記)が高いため硬い運動になり,力制御では剛性が0であるため軟らかい運動になる.つまり接触時に前者は接触対象を容赦なく押し潰す運動となり,後者は優しく対象物に接することになる.逆に,自由動作時には前者は位置を決められるが,後者では決められず場合によっては無限遠に向かうことになる.現在のロボットは速度制御しか持ち合わせず,その運動はぎこちなく不器用でかつ危険であるため,一般社会にはいまだ受け入れることが困難である.
速度制御と力制御を高度に統合した制御に力触覚伝送がある.これを用いることで人間の持つ力触覚機能をそのままロボットを通して発現させることが可能となる.力触覚伝送は,操作者が運転する手元側(マスタ)と対象物を実際に操作する遠方側(スレーブ)間で行われる.その際,次の二つの機能を同時に満たすことが必要である.
① 手元側(マスタ)と遠方側(スレーブ)が同じ動きをすること(同期性).
② 遠方側で発生する作用力と手元側で発生する反作用力が等しいこと(双方向性).
これを二端子対回路でモデル化すると図2を得る.このような双方向性の制御方式をバイラテラル制御と称する.ここでは制御器をハイブリッド行列で表している.

理想的な同期性は で,理想的な双方向性は
で,理想的な双方向性は で表される.実際には理想状態からのずれ(すなわち誤差)があるのでそれを
で表される.実際には理想状態からのずれ(すなわち誤差)があるのでそれを ,
, で表すと次式で表される.この二つの誤差を同時に0にすれば力触覚伝送が可能になるはずである.
で表すと次式で表される.この二つの誤差を同時に0にすれば力触覚伝送が可能になるはずである.

(1)

(2)
1940年代に米国アルゴンヌ国立研究所で始まったとされる力触覚伝送研究は(4),以後ほとんど全てこの誤差を速やかに0に収束させるための研究であった.しかし, を0にする(=作用反作用則)には理想的力制御を適用しなくてはならず,一方では,
を0にする(=作用反作用則)には理想的力制御を適用しなくてはならず,一方では, を0にする(=同期性実現)には理想的速度制御を適用しなくてはならない.この二つを同時に一つの制御器で実現するには,制御器の剛性が零と無限大の値を同時に取らなくてはならず,矛盾を引き起こす.これを乗り越えるには二つの解決策が必要であった.
を0にする(=同期性実現)には理想的速度制御を適用しなくてはならない.この二つを同時に一つの制御器で実現するには,制御器の剛性が零と無限大の値を同時に取らなくてはならず,矛盾を引き起こす.これを乗り越えるには二つの解決策が必要であった.
① 二つの誤差方程式を独立な「誤差」と見ずに,まとめて「変換」として扱うこと.
② ロバストな運動制御と等価である加速度制御を導入し,力検出器なしに理想的な力制御系を実現すること.
①はマスタとスレーブの全ての変数をアダマール変換により(仮想的な)コモン軸とディファレンシャル軸に写像することにほかならない.これを式で表すと次のようになる.


力触覚伝送は かつ
かつ に収束させることであり,結局コモン軸で(理想的な)力制御を,ディファレンシャル軸で(理想的な)速度制御を行うことと等しい.次にコモン軸,ディファレンシャル軸からマスタ軸とスレーブ軸に逆写像すれば力触覚伝送が可能になる.
に収束させることであり,結局コモン軸で(理想的な)力制御を,ディファレンシャル軸で(理想的な)速度制御を行うことと等しい.次にコモン軸,ディファレンシャル軸からマスタ軸とスレーブ軸に逆写像すれば力触覚伝送が可能になる.
②については,次の性質が既に明らかにされている(5).
「機械系の運動制御において,理想的力制御と理想的速度制御を実現するにはその運動の加速度が制御されていることが必要十分条件である.逆に言えば,加速度が完全に制御されていれば,理想的な速度制御と理想的な力制御の両方が必ず実現される」
したがって,マスタ軸とスレーブ軸がそれぞれ独立に完全な加速度制御がなされていれば,仮想的なコモン軸,ディファレンシャル軸上でそれぞれ かつ
かつ を実現できるので,その結果をマスタとスレーブに逆写像すれば収束性が保証され,結局力触覚伝送が可能になるのである.もちろん,収束時間は人間が違和感を生じないようにかなり速くなくてはならない.
を実現できるので,その結果をマスタとスレーブに逆写像すれば収束性が保証され,結局力触覚伝送が可能になるのである.もちろん,収束時間は人間が違和感を生じないようにかなり速くなくてはならない.
図3はマスタとスレーブ用の小形モータが接続されている力触覚伝送のための通信機とその内部で動作する信号処理の専用モジュールを示す.
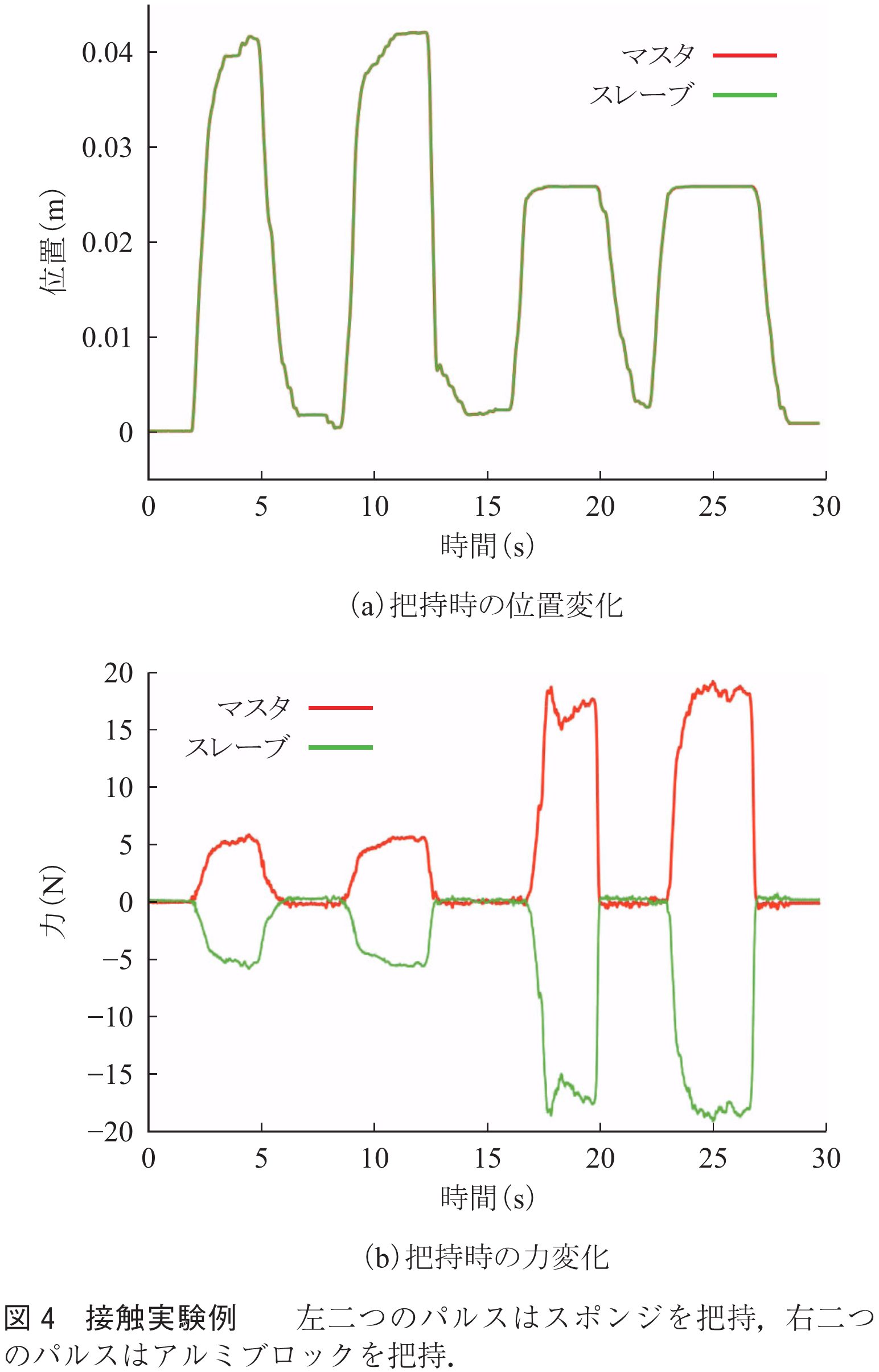
図4に力触覚伝送の実験結果を示す.実験はマスタ側を操作者が操作し,スレーブ側でスポンジを2回把持し,その後アルミブロックを3回把持した.
対象の軟らかさと硬さが操作者に十分伝わっていることが理解できる.このように,人間の五感のうち,力触覚を伝送することが可能になった.

ハプティクス技術を応用することで医療福祉等の人間支援分野において動作や行動を直接的に支援しQOLの向上を実現することができる.本章では幾つかの先行例を示す.
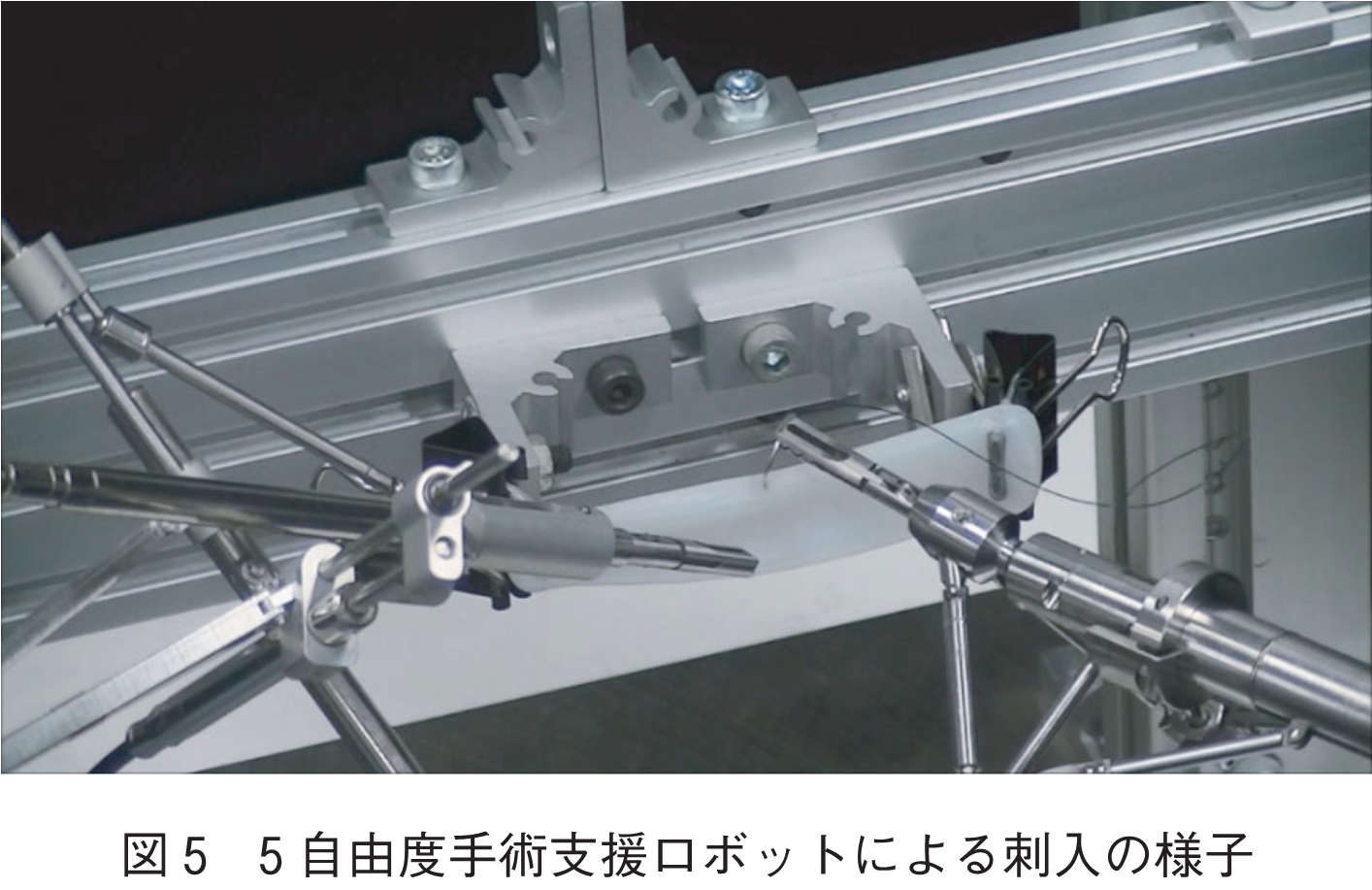
近年,医療の発達から人体に与える負荷が少ない低侵襲性の手術が多く行われている.低侵襲内視鏡下手術は,腹部に小さな穴を数か所開け,そこからカメラや鉗子等の器具を挿入し,腹腔内で部位を視認しながら患部の切除や縫合を行う高難度な手術である.これを高度に支援する手術支援ロボットの研究が多く行われているが,力触覚の機能を十分には有していないため,適用範囲に限りがあった.ハプティクス技術を応用することで,ぜい弱な臓器を対象とした一般外科までを含む広い手術分野でのロボット活用が可能となってくる.そればかりか,術中の力触覚情報を施術者に提示し注意を促すことや,力加減まで含めた手術行為を記録再現することが可能となる.図5では刺入行為を記録再現する様子を表している(6).術者はマスタを操り,スレーブが患部に対して施術を行う.そのときに得られた力触覚データに基づき,手術ロボットが自動で刺入動作を行うことが可能となる.
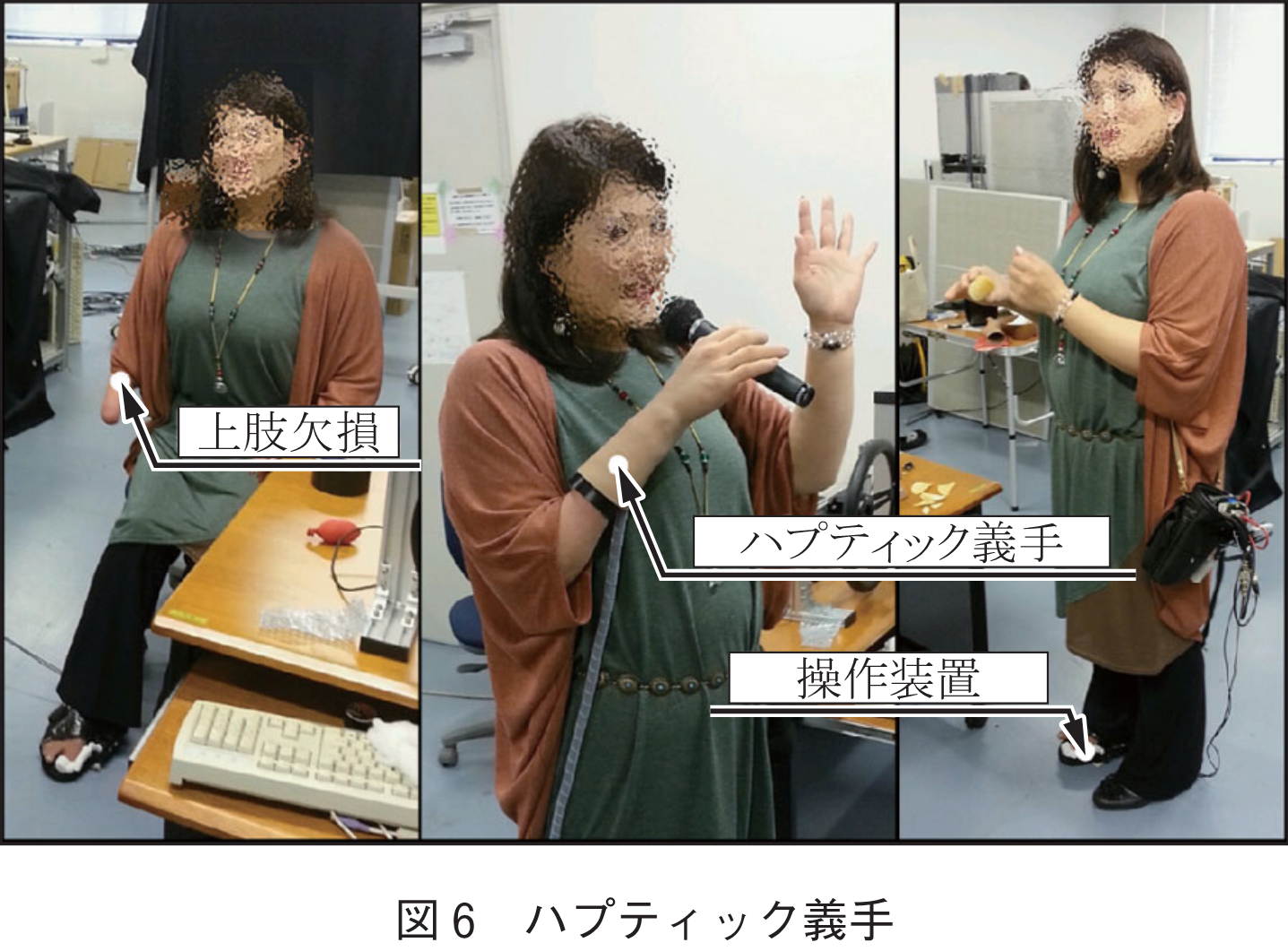
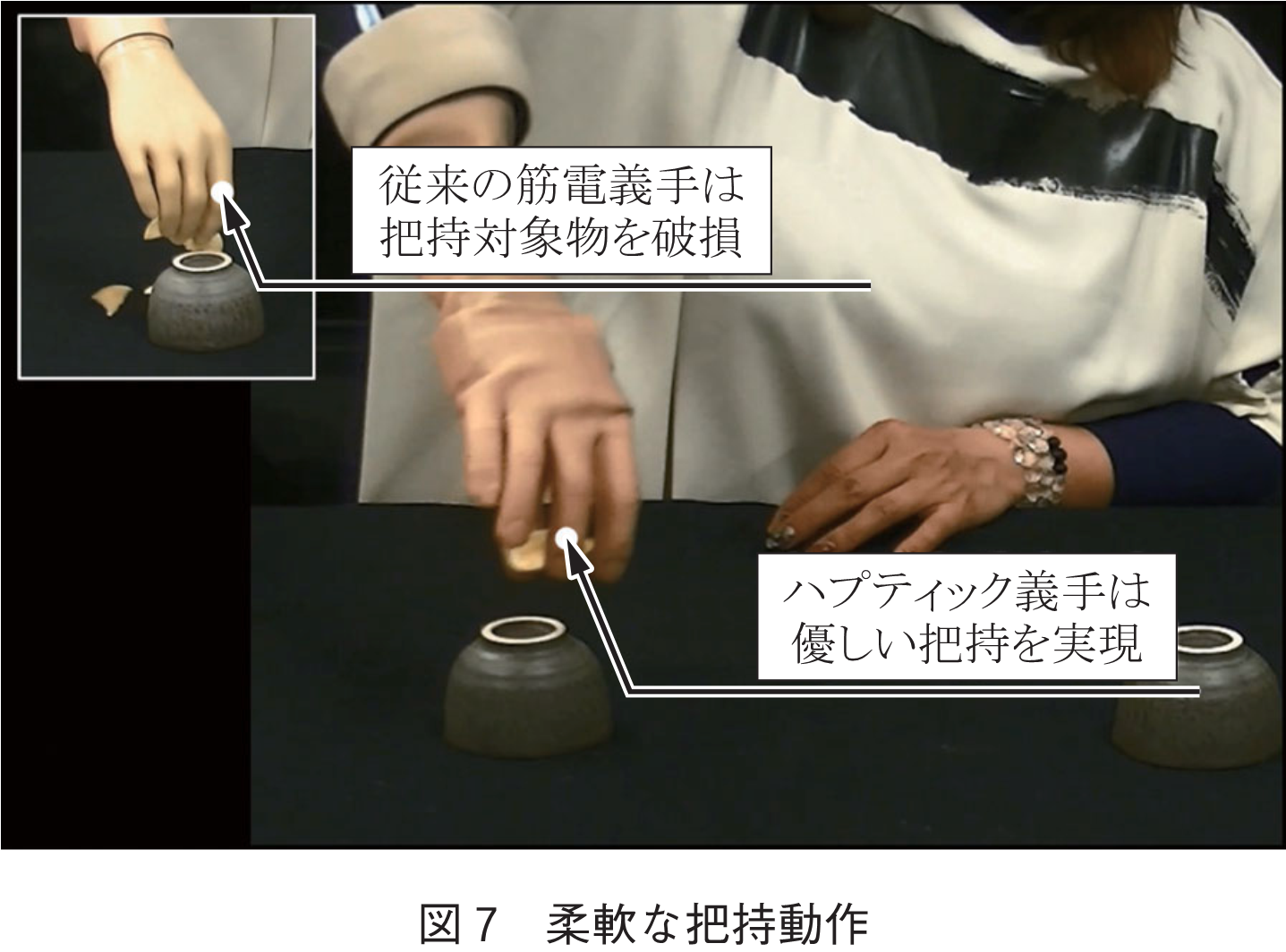
ハプティクス技術を応用し開発した義手を図6に示す.欠損した上肢の力触覚知覚機能を下肢(右下肢の母指)に代替させることで運動機能の人工補完を実現している.前述したように従来の産業用ロボットは接触作業を苦手としているが,人間は制御力源と力触覚を巧みに活用することで接触を伴う多様な作業を柔軟にこなしている.特に,未知の対象物やもろい物体のハンドリングにおいて,力触覚はなくてはならない機能である.図7に従来の義手(筋電義手)と開発した義手との比較を示す.図7ではもろい物体(ここではポテトチップス)の把持を行っている.従来の義手では力加減の調整を行うことが困難なため対象の物体を破損してしまっているが,開発した義手は力触覚によって把持対象物への高度な適応性を発揮し安全かつ優しい把持を実現している.人間の根本的感覚である力触覚を活用しているため,訓練を要することなく,直感的な操作が可能である.
ハプティクス技術では適切な制御機能を装置に実装することで,力と速度,二つのエネルギー源を用途に応じて組み合わせて活用可能であることを示している.これは生物が長い進化の歴史で勝ち取り,ごく自然に行っている身体動作の制御機能である.力と速度の組合せにより力強くも滑らかな動きが可能であるということは,人間の動作を構成するこれらの情報を計測することで身体機能の評価が可能であることを示している.計測装置に0を入力とした理想的な速度(位置)制御を実装することで,双対量である力が計測可能となり,0を入力とした理想的な力制御を実装することで速度(位置)を計測することができる.二つの制御を適宜使い分けることで,人間の動作を構成する「力加減」と「動き」の要素を抽出し,計測評価することが可能である.
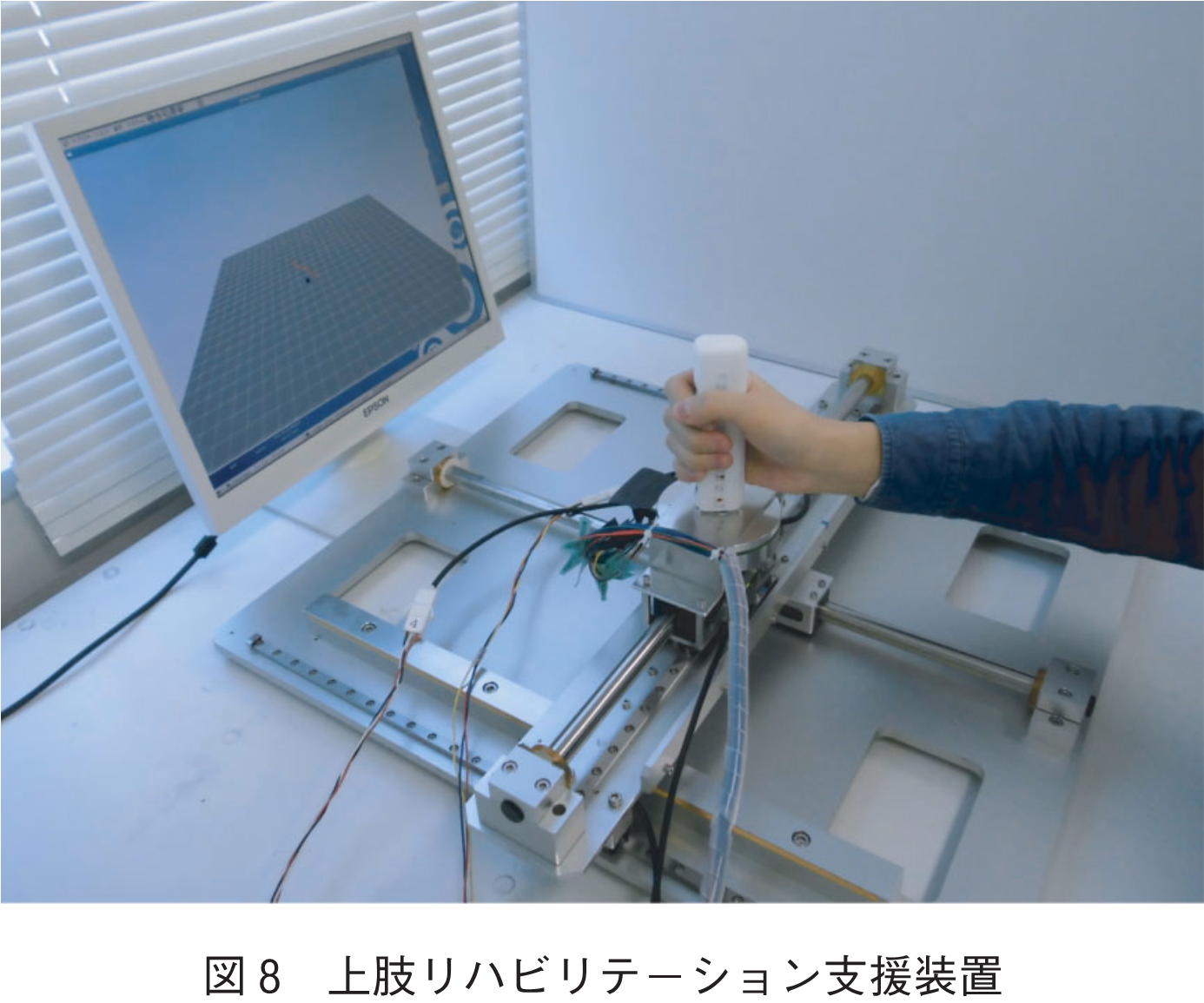
一つの例として,図8に示すような力触覚通信を可能とする上肢リハビリテーション支援装置を紹介する.脳卒中に代表される脳血管障害では後遺症として上肢,下肢の運動機能が麻痺してしまうことが知られている.しかし,麻痺の度合いや部位,症状などが患者によって異なるため,個人の身体機能に対する定量的評価やセラピストの経験知の明示化などが求められている.文献(7)では,操作者の運動能力に応じてリハビリテーション支援装置の制御剛性を動的に変化させることで,装置が補助する力を操作し,効果的なリハビリテーション支援を実現している.この場合は,身体運動情報として速度(位置)情報を取得し,装置の出力を変化させることで,人と装置の相互作用力を制御している.また文献(8)では,身体運動情報として手先の力情報を取得した場合の応用結果を示している.この文献では,取得した力情報に対して生体機構学に基づいた解析法を活用することで,筋機能の分析にまで応用可能であることを示唆している.このようにハプティクス技術は,今後のQOL向上の鍵となる個人の身体機能の計測評価の実現にもつながる.
ハプティクス技術は機械をいわば人間のように動作させる技術である.特に道具を介して様々な動作を行い,QOLを高めることができるため,生産分野のみならず医療,介護・看護,リハビリテーションなどの分野でも人間を直接補助してくれる機能を有する.もちろん,通信路を介して遠隔操作を行うことも可能であり幅広い応用が考えられる.このように人間のQOLを高めその幸せに貢献するとともに,労働力のひっ迫する少子高齢化社会の産業にも大きな寄与が可能である.
(1) www.meti.go.jp/press/2014/01/20150123004/20150123004b.pdf
(2) www.meti.go.jp/press/2013/07/20130718002/20130718002-3.pdf
(3) http://www.rethinkrobotics.com
(4) 横小路泰義,“マスタ・スレーブ制御の理論,”日本ロボット学会誌,vol.11, no.6, pp.26-34, 1993.
(5) A. Sabanovic and K. Ohnishi, Motion Control Systems, John Wiley & Sons, Feb. 2011. (ISBN 978-0-470-82573-0)
(6) T. Matsunaga, D. Tomizuka, K. Yu, T. Mizoguchi, and K. Ohnishi, “Construction of motion reproduction system using haptic forceps robots for needle insertion,” Proc. the 42nd Annual Conference of the IEEE Industrial Electronics Society, IECON 2016, pp.722-727, 2016.
(7) D. Pilastro, R. Oboe, and T. Shimono, “A nonlinear adaptive compliance controller for rehabilitation,” IEEJ Journal of Industry Applications, vol.5, no.2, pp.123-131, March 2016.
(8) N. Tojo, T. Shimono, T. Kaneko, T. Tsuji, and T. Mizoguchi, “Estimation of antagonistic output ratios based on force distribution at end effector of limb,” IEEE Trans. Ind. Electron., vol.64, no.2, pp.1783-1792, 2017.
(平成29年4月25日受付 平成29年5月18日最終受付)


続きを読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()