|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|

abstract
ワイヤレス給電システムの開発に6年間従事した間に遭遇した興味深い現象と,今後有用となりそうなシステムの概要を紹介している.これらは,従来余り広く取り上げられなかった水中給電から研究を始めて得た,様々な方向へ展開できるヒントである.ワイヤレス給電は電力工学と通信工学の節点であるだけでなく,多彩な応用先に対応する広い分野との接点でもある.そのため電子情報通信技術者にとって尽きることのない挑戦の場を提供している.
キーワード:ワイヤレス給電,水中給電,隔壁給電,周期構造,ディスクレピータ,導場路,塩水の誘電率
近年,通信は無線が実用的となり生活に浸透した.電源も無線化が試みられており,家電機器用のQi(チー)など実用化した例もあるが,大電力化・高効率化・長距離化に向けてまだ課題は多い(1).また,電力の送電形式によって
① 能動的に電力を送るワイヤレス給電
及び,
② 電力は能動的に送らないがその場で賄えるように周囲のエネルギーを利用するエネルギーハーベスティング
に分類される.我々は①のワイヤレス給電技術の開発に携わっている.
通信が広範に無線化されたことに伴って通信機用の電力も無線伝送化されつつあるが,それにとどまらず,無線送電技術は様々な用途に向けることができる.その中で広く関心を集めているテーマは,電気自動車,ロボット,医療器具などへの無線給電であろう.しかしこの技術が世に知られるにつれて更にいろいろな分野で検討が始まっており,必ずしも電気電子技術を専門としない人々が必要に迫られて果敢な挑戦を試みている.
この技術は電力工学と無線通信の両技術を含む境界領域にあり,両分野の技術者が最も担当する能力を持っているはずであるが,両者とも動きが少し鈍いように見える.もっとニーズをくみ上げて,必要とする領域の技術者と交流を深めるべきであろう.もちろん境界領域であるがゆえの新しいシーズを見いだす努力も必要である.シーズとニーズの開拓を目標に,我々が及ばずながら日本の技術立国再建のため努力していることを御紹介したい.
昔から水中通信は難しいと言われてきたが,水中給電も高周波を用いるので同じことが言えるであろう.しかし海洋国日本こそが世界に先駆けて水中給電に取り組み,現在の短距離でしか使えない不便なシステム(2)を改善する必要があろうと考え,水中給電の研究を始めた.当初十分大きな水の壁を作る用意がなかったため,図1のように大きめのペットボトル(2L)に水を入れて,それを並べて予備的に実験を進めた.その結果ペットボトルを共振コイル間に挿入した方がしないときよりも伝送効率が上昇するという意外な結果に遭遇した(3).「それならば」ということで,直径5cmほどのプラスチックホースに水を詰め,共振コイル中心を結ぶ線に沿って置いたところ,やはりかなり大きく効率が増大した.以上は誘電体媒質が対象であったが,磁性体であるフェライト板や導体である銅パイプを同様に共振コイル間に置いても大幅な効率向上を観測することができた(3).

これはどうやら置かれた物体に沿って電磁界がガイドされている可能性があると考え,電磁界に対する境界条件を振り返ってみると以下のようなことが明らかとなった.異なった媒質が図2のように境界を接しているとき,マクスウェル方程式から式(1)が成り立つので,電界・電束密度ベクトルの向きについて式(2)のような関係が成り立つ.つまりこれらベクトルは物質境界で図2のような屈折則に従うため,それを用いて異なる媒質の存在による電磁界閉込めをうまく説明できる可能性がある.そのような構造を“導場路”と呼ぶことにした(4).

(1)

(2)
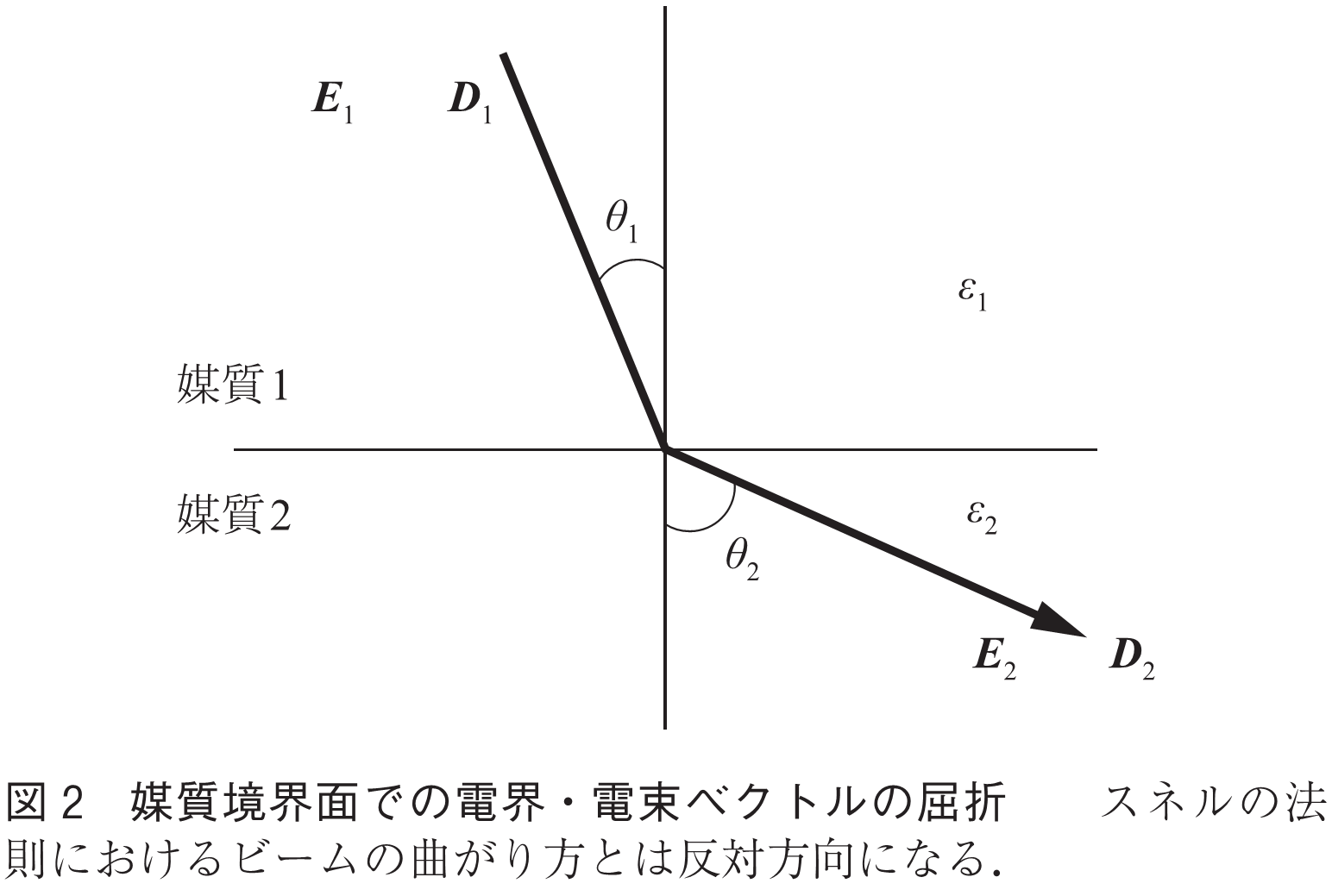
磁界,磁束密度に対しても同様な関係が成立するので,磁性体による閉込め効果も説明が期待できそうである.我々はこれらの関係式を用いて“導場現象”を説明したことはないが,既存の媒質だけでなくメタマテリアルも対象に含めてこの現象の理論化を行うとともに,新しい応用を考案することは興味深い.
何も存在しない空間で,できるだけ遠くまで無線給電するのはこの技術に対する標準的な要求であるが,空間を遮る何らかの壁に穴を開けたりせずに,それを越えて給電したいという要求も大きい.例えばドローンによって観測基地用の蓄電池に,あるいは靴底に埋めた発信機に給電したいといった用途は,それぞれコンクリート壁,プラスチックという“隔壁”を越える給電である.
越えることが困難な厚い金属板という隔壁に挑戦した例も存在するが(5),大抵の障害物は固体・液体にかかわらず「誘電体媒質」に位置付けられる.媒質中の電力伝送でも,空気中と同様伝送効率は結合係数 (用語)と共振器無負荷
(用語)と共振器無負荷 (用語)の積
(用語)の積 (用語)で決まる.そして一様媒質中では結合係数は空気中と変わらない.したがって伝送効率を高くする上で最も重要なパラメータは
(用語)で決まる.そして一様媒質中では結合係数は空気中と変わらない.したがって伝送効率を高くする上で最も重要なパラメータは である.
である.
誘電体ならば伝送領域から電界を取り除けば損失は減少して は大きくなるので,最も簡単な方法は共振コイルに大きな外付け容量を加え,電界エネルギーをできるだけその中に閉じ込めてしまうことである.外付け容量による電界閉込めの効果を示すため電磁界測定器Narda EHP-200を用いて共振器の作る電界を測定した.水平に置かれたスパイラル共振器から上に向かってプローブを移動し鉛直方向の電界を測定した結果は図3のようになった(6).外付け容量を1nFから100nFへと増加するとともに電界は着実に減少していることが分かる.特に示さないが磁界は容量にかかわらずほぼ一定であった.
は大きくなるので,最も簡単な方法は共振コイルに大きな外付け容量を加え,電界エネルギーをできるだけその中に閉じ込めてしまうことである.外付け容量による電界閉込めの効果を示すため電磁界測定器Narda EHP-200を用いて共振器の作る電界を測定した.水平に置かれたスパイラル共振器から上に向かってプローブを移動し鉛直方向の電界を測定した結果は図3のようになった(6).外付け容量を1nFから100nFへと増加するとともに電界は着実に減少していることが分かる.特に示さないが磁界は容量にかかわらずほぼ一定であった.
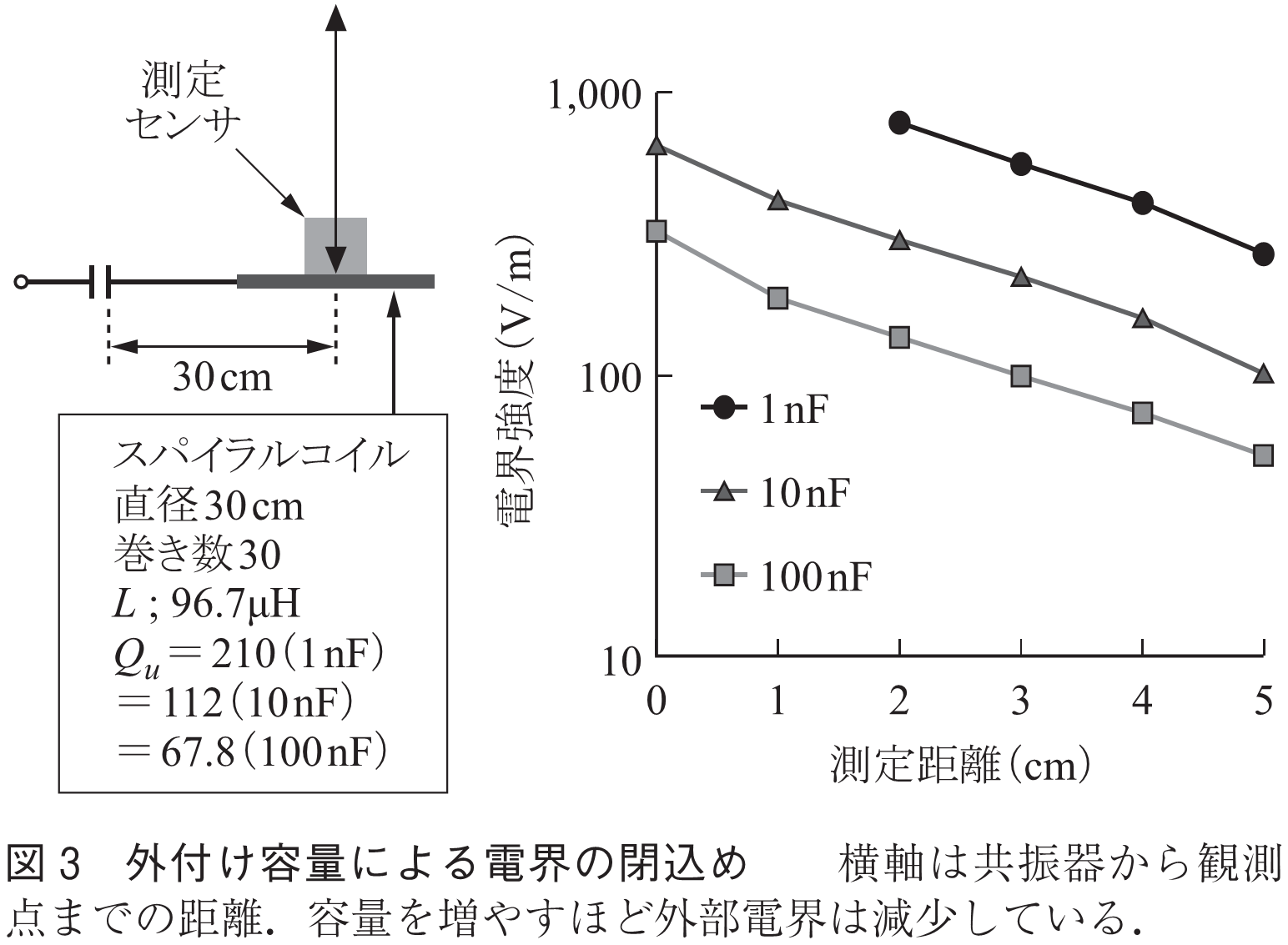
しかし「あちら立てればこちら立たず」というとおり,大きな容量を接続すると図3中に示したように共振器としての無負荷 が大幅に下がり,いわゆる
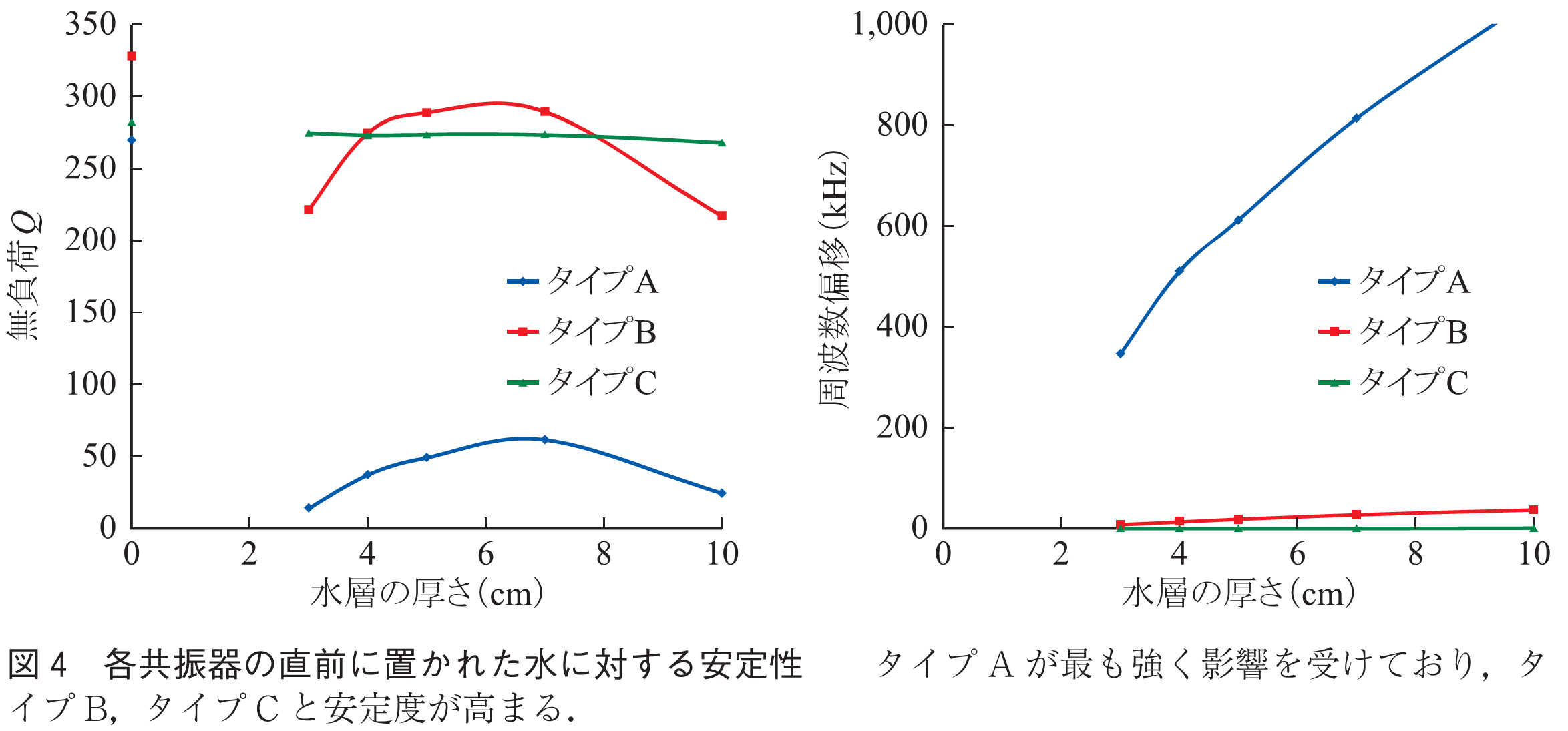
が大幅に下がり,いわゆる 積の低下そして伝送効率の低下につながってしまった.そこで我々は表1のような二重共振器という概念を提案し,2枚のスパイラル共振器間に電界エネルギーを閉じ込め,大きな外部容量を接続せずとも誘電体の影響を減らすことに成功した(7).
積の低下そして伝送効率の低下につながってしまった.そこで我々は表1のような二重共振器という概念を提案し,2枚のスパイラル共振器間に電界エネルギーを閉じ込め,大きな外部容量を接続せずとも誘電体の影響を減らすことに成功した(7).

表1に外部容量なしで自己共振するオープンスパイラル共振器,外部容量付きの普通の共振器,二重共振器の3種類の仕様を示し,図4にはそれらに密着して10cmの深さだけ水道水を入れた底面直径50cmのたらいを置いたときの共振周波数と の変化を示している.ある程度大きな外部容量を取り付けたタイプBでも水の影響を余り受けていないが,タイプCの二重共振器のより高い安定性が見て取れよう.
の変化を示している.ある程度大きな外部容量を取り付けたタイプBでも水の影響を余り受けていないが,タイプCの二重共振器のより高い安定性が見て取れよう.
水は優れた溶媒であるために様々な物質を溶かし込み,とりわけ電解質は水中で電離して導電率を大幅に上昇させるため,電磁波伝搬あるいは電磁界結合にとっては極めて厳しい環境を形成する.電磁波は電界と磁界の比が一定となり人為的にその比を制御することはできないが,前章で述べたように共振器などの近傍に存在する非伝搬解はそれが可能であるために厳しい環境を克服できる可能性がある.水も連続媒質と見たとき,それを介した共振器間結合係数は空気中と同じであるから共振器無負荷 を大きくすることが重要である.
を大きくすることが重要である.
我々は淡水中のロボット魚や海水中のAUV(Autonomous Underwater Vehicle)への無線給電を目指して様々な濃度の塩水中でスパイラル共振器がどのように振る舞うかを調べた.そのために共振器の変更可能なパラメータすなわち,コイル寸法・配列,外付け容量,共振周波数などの関数として を測定し,以下のような現象論的だが有益な結論を得た(8).
を測定し,以下のような現象論的だが有益な結論を得た(8).
① 外付け容量を大きくすることによって塩水による損失は軽減される.
② しかしそれは塩分濃度1%以下でのみ正しい.
③ 共振コイルの構造ごとに損失最小となる最適共振周波数が存在する.
④ 海水(塩分濃度3.5%程度)に対しては共振器多層化が損失低減に効果的である.
これらの理由を解明するため共振器の作る電界の塩水中分布をシミュレーションで求め,塩水の誘電率,導電率との関わりでそれが伝送損にどう影響するかを考察することにした.そこでまずスパイラル共振器の無負荷 の面前に置かれた水による変化を測定した.前章と同じくコイルより十分大きなたらいに水を10cm満たしその下に直径30cmのスパイラル共振器を置いて,無負荷
の面前に置かれた水による変化を測定した.前章と同じくコイルより十分大きなたらいに水を10cm満たしその下に直径30cmのスパイラル共振器を置いて,無負荷 の水の塩分濃度への依存性を測定した結果が図5である(9).この共振器は巻き数をパラメータとしているが,それに応じて外付け容量を加減して共振周波数を1MHzに保っている.それゆえこのグラフの全曲線を通じて周波数は一定に保たれているため,ここに現れた全ての変化には電解質を溶かした水の分散性の影響は入っていない.
の水の塩分濃度への依存性を測定した結果が図5である(9).この共振器は巻き数をパラメータとしているが,それに応じて外付け容量を加減して共振周波数を1MHzに保っている.それゆえこのグラフの全曲線を通じて周波数は一定に保たれているため,ここに現れた全ての変化には電解質を溶かした水の分散性の影響は入っていない.
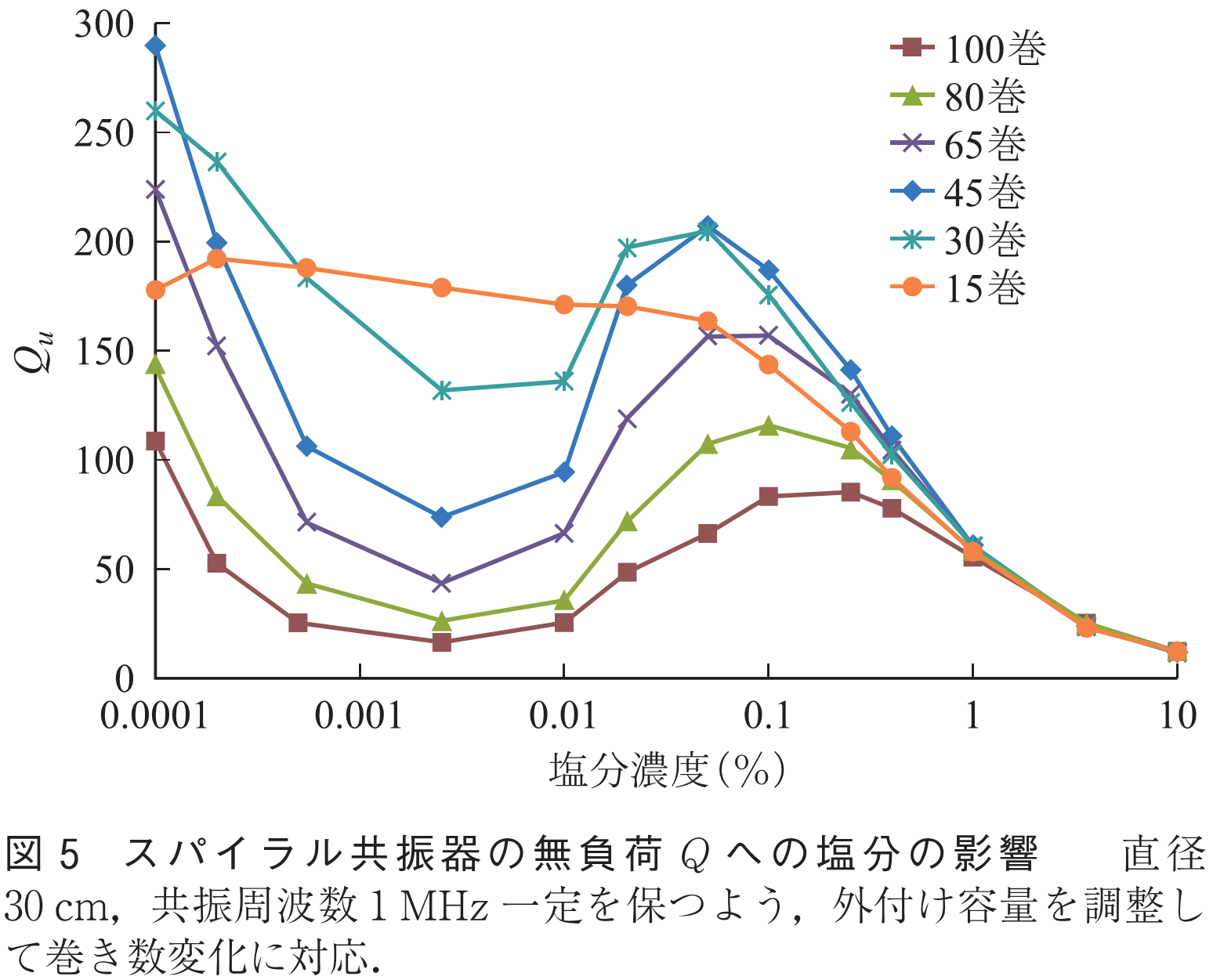
結果を見てまず気付くことは,塩分濃度が増えるにつれて が下がっていくのではなくて極大極小値を持つことである.もう一つは,巻き数が少ないほど(外付け容量が大きいほど)極小値への落ち込みが緩やかになることである.後者は外付け容量増加とともに水中に存在する電気エネルギーが減少することから理解できるが限界がある.更に前者はこれまでに得られている塩水の持つ誘電特性データと照らし合わせても説明が困難であり,謎に包まれている.
が下がっていくのではなくて極大極小値を持つことである.もう一つは,巻き数が少ないほど(外付け容量が大きいほど)極小値への落ち込みが緩やかになることである.後者は外付け容量増加とともに水中に存在する電気エネルギーが減少することから理解できるが限界がある.更に前者はこれまでに得られている塩水の持つ誘電特性データと照らし合わせても説明が困難であり,謎に包まれている.
図6は我々がディスクレピータと呼んでいる非接触給電回路である.これも2.の予備的水中給電実験から生まれた方式で,当初“導場路”の一つとして試みた金属パイプを出発点としている(4).パイプも見事に“導場”したが,電磁界は導波管のようにパイプ内を通るには周波数が低すぎるためカットオフとなって,外を通っていることが確認できた.しかしパイプ直径はスパイラルの半分もあり非常に扱い難いので,もっと簡単な構造を探した結果到達したのが図6のディスクレピータであった(10).
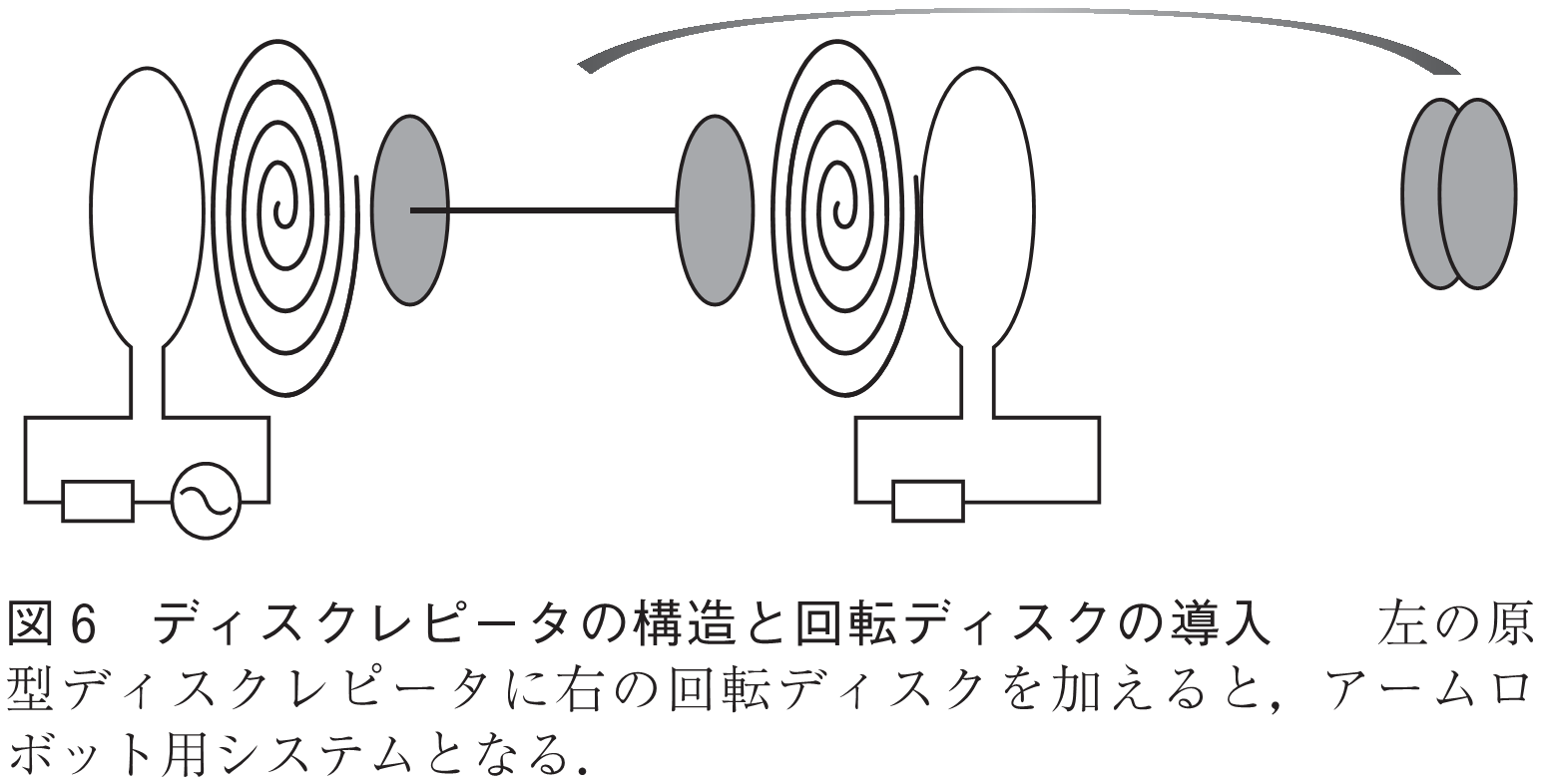
この構造の特徴は,
① 直径がスパイラルの約半分の2枚の金属板と1本の電線のみから構成され極めて簡単な構造である.
② 金属板は相対するスパイラル共振器から少し離れており非接触給電となっている.
③ 大部分が有線であるため非常に低損失である.
④ これ自身は非共振のため広帯域動作が可能である.
⑤ オープンスパイラル共振器がバラン的な役割を果たしておりレピータ部はコモンモード伝送である.
とまとめられる(10).当初これらを生かした利用法をなかなか思いつかず,言わば宝の持ち腐れ状態であったが,昨年偶然の機会にアームロボットの関節越し給電にうってつけであることに気が付き,現在それに向けて必要な改善と可能性開拓を進めている.
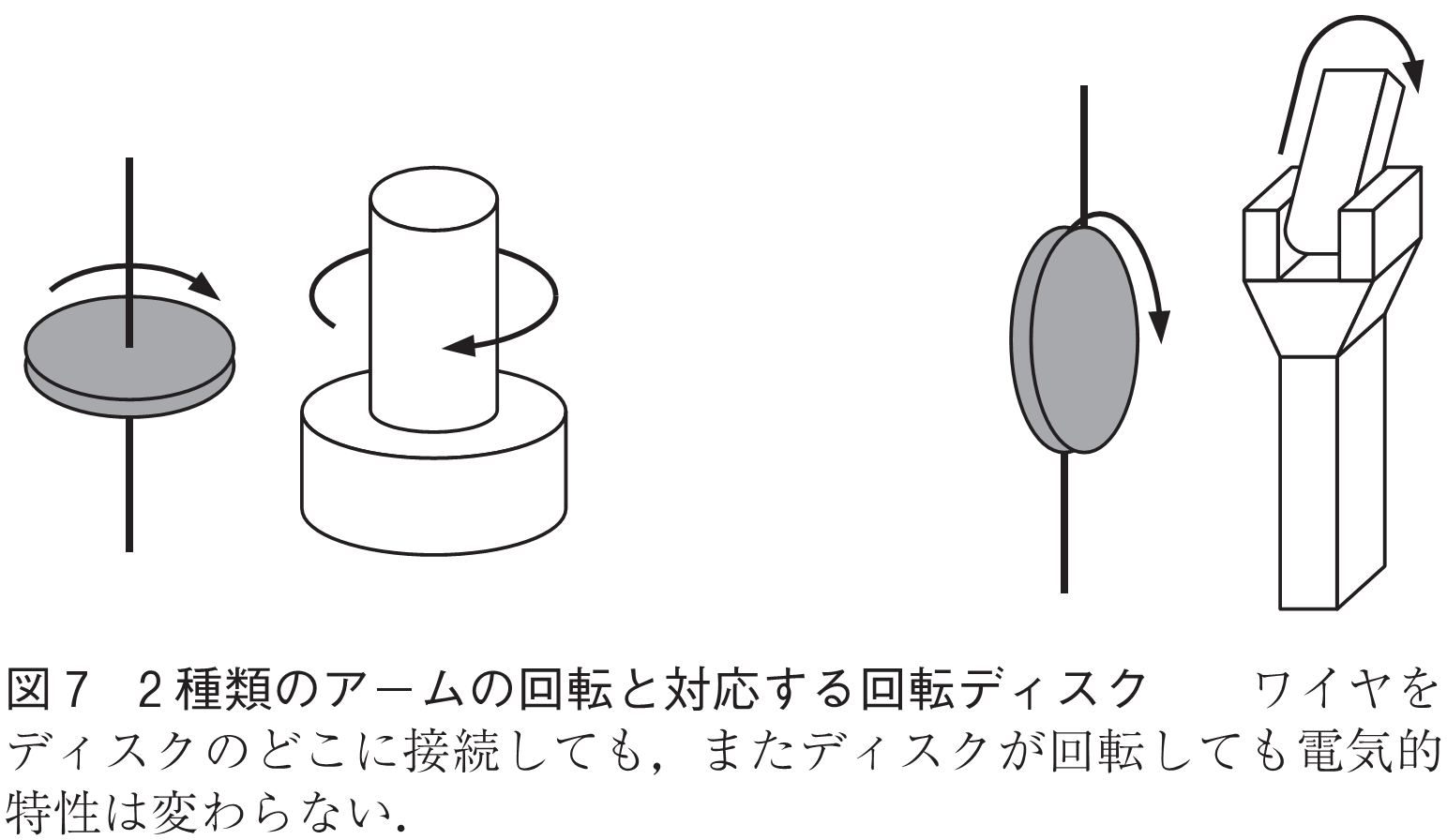
図6に示すようにまずディスクを結ぶワイヤを切断し,そこに新たに2枚のディスクを相対して接続する構造が出発点である.この2枚のディスクを回転ディスクと呼び,図においてスパイラルコイルと結合する(1枚の)ディスクは結合ディスクと呼ぶ.回転ディスクをロボットアームの関節内に空間を設けて設置すれば,そこで関節とともに自由に回転し非接触給電が可能となる.その際,アームに要求される回転の全てである図7のような2種類の回転に対応可能である.なお前述⑤のコモンモード伝送は,アームロボットへの応用ではロボット構造が金属でできているため解消されて帰線が構成され,ノーマルモード伝送となろう.したがって逆にシールドされた空間を電力伝送するシステムを構成することになり,非常にEMC問題に強いシステムが出現する.
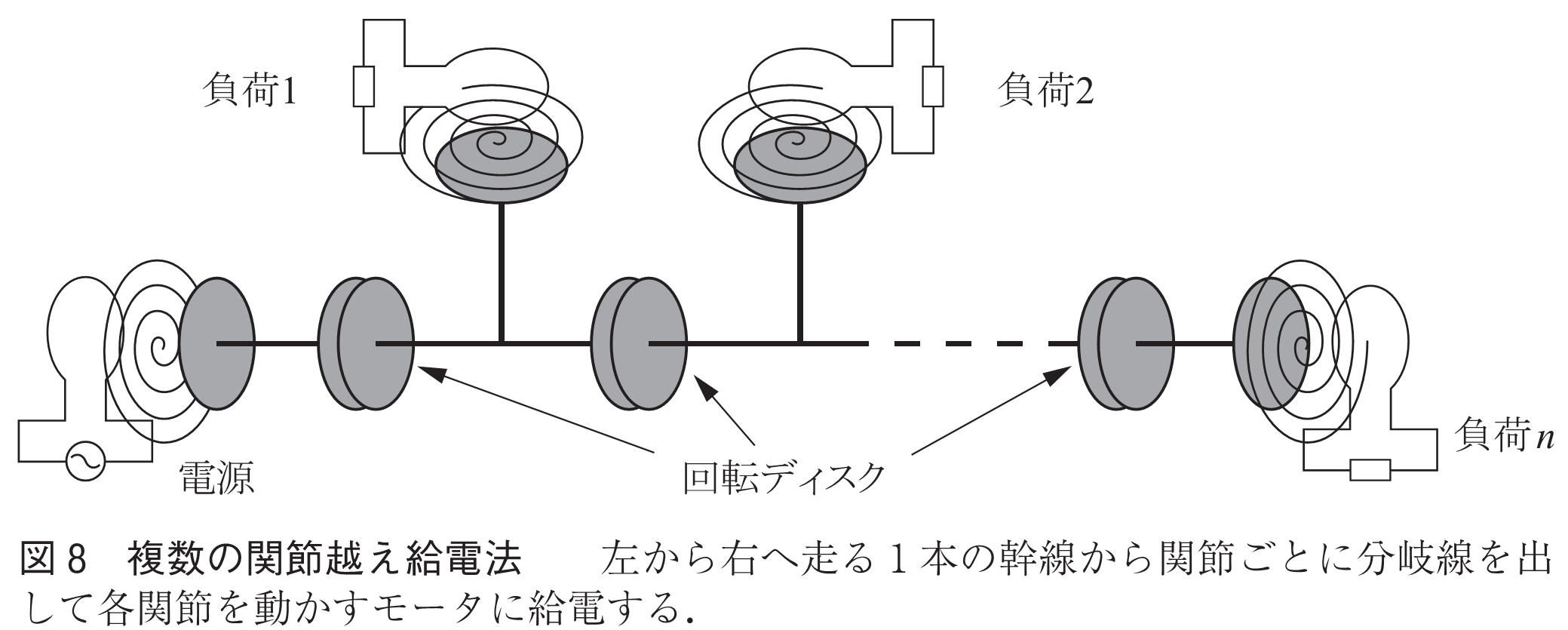
次にアームロボットの関節経由非接触給電方式では,図8のように1本の動脈のような幹線を設けてそこから各関節のモータに電力を分岐するという方式が適切であると思われる(11).前述④のシステムの非共振性は分岐を容易にする.仮に関節においてコイル共振器のペアで非接触給電するような方式では,それ自身非常にかさばる上に関節ごとに配置された共振器の調整が煩雑過ぎて実用化困難である.我々のシステムでは,更に各モータの制御信号も同じ幹線上で,より高周波のチャネルを設けることによって伝送可能である.
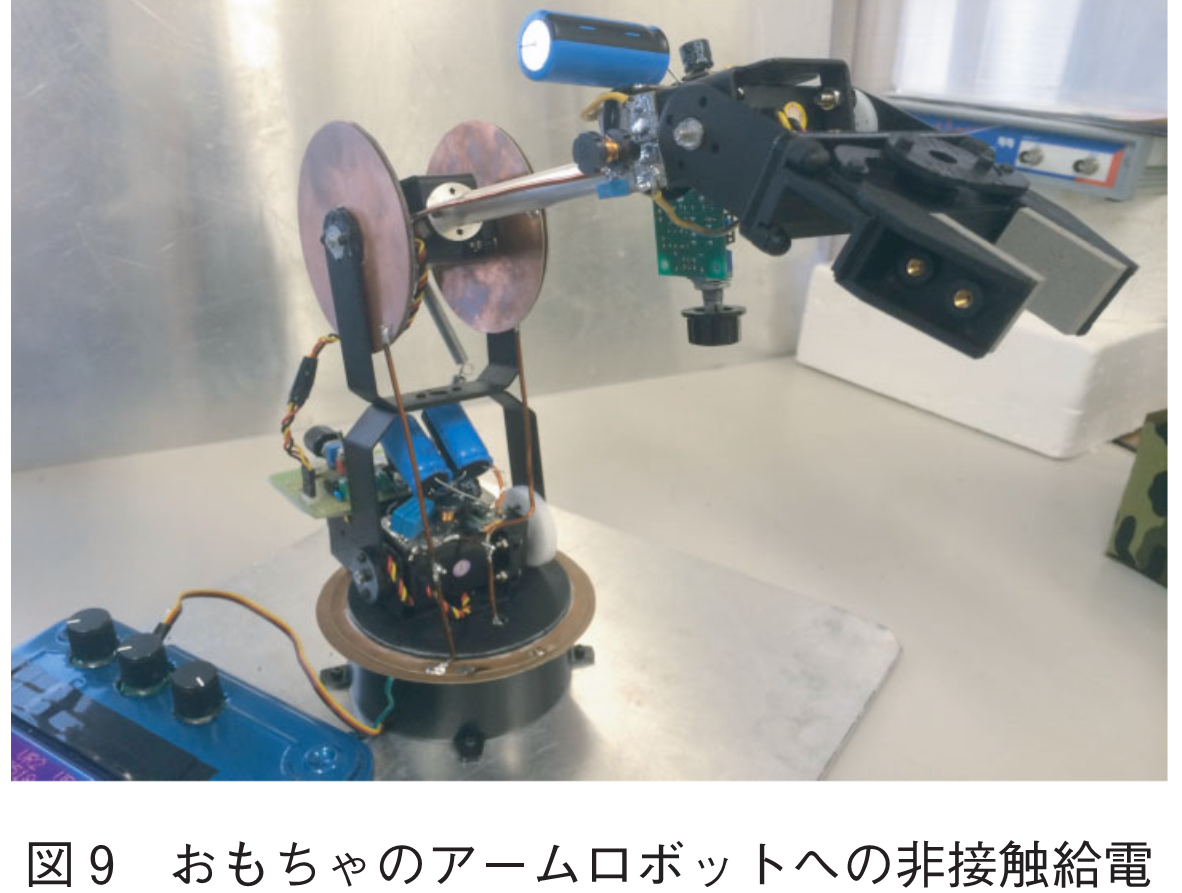
この方式を現実のロボットに適用するにはまず装着して実験せねばならないので,ロボットメーカの協力を早く得るべく提携先を探し出して先へ進む必要がある.とりあえずおもちゃのアームロボットを改造して図9のように2関節越しの非接触給電を試みた.
海洋開発は日本にとって最も重要なテーマの一つと言ってよいであろう.海底資源探索や地震観測を含む多くの海底科学研究がいま活発に行われている.その中で求められる技術の一つは海底掘削ドリルへの非接触給電である.ドリル先端付近の情報を海上に伝送するためには電気エネルギーが必要であり,現在は電池に依存しているが容量,持続時間共に不十分である上に,取り換えにはばく大な費用と時間を要する.そこで我々は海洋研究開発機構とともにそのための非接触給電研究を開始した.
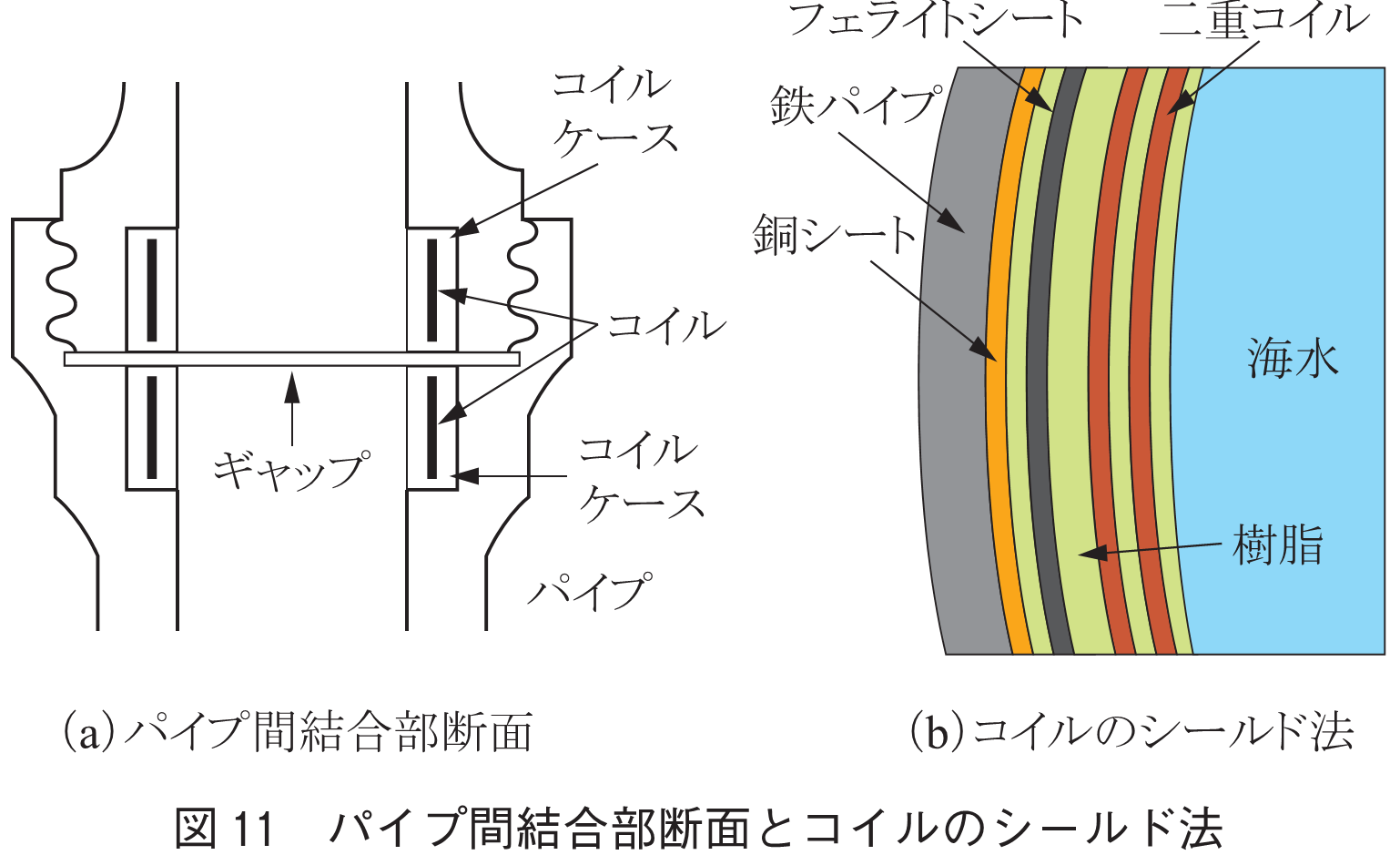
ドリルによる海底掘削は図10のようなパイプ先端にドリルビットを装着し,下側のパイプに新しいパイプを船上でねじ込むことによってつなぎ合わせながら海中を降下し,更に海底下を掘り進むという作業である.そのつなぎ合わせ部分で電力ケーブルの結線をすることはできないため,そこで非接触給電を行う必要が出てくる.

パイプの接続部分には海水が間近に存在するので電界結合ではなく磁気結合の方が損失は少なそうであり,結合係数もより大きく取れそうなのでコイル間結合を選ぶ.しかし同時に鉄パイプも間近に存在するので,コイルをむき出しで鉄パイプと近接させることはできない.そこで図11(b)のように銅はくとフェライトシートを用いてコイルを鉄パイプからシールドする.まず1か所のコイル間結合の特性を有限要素法に基づく電磁界シミュレータHFSSの計算値と実験で求め,その結果から一組のコイルのインダクタンス,抵抗値を得る.次に作製した結合部を単位パイプ両端に取り付け,限りなく多くのパイプを縦続接続して長いドリルパイプとしたとき,どのような伝送特性を示すかを知るために周期構造理論を使うことができ,図11のような構造に対してその伝送効率を定式化することができた(12).
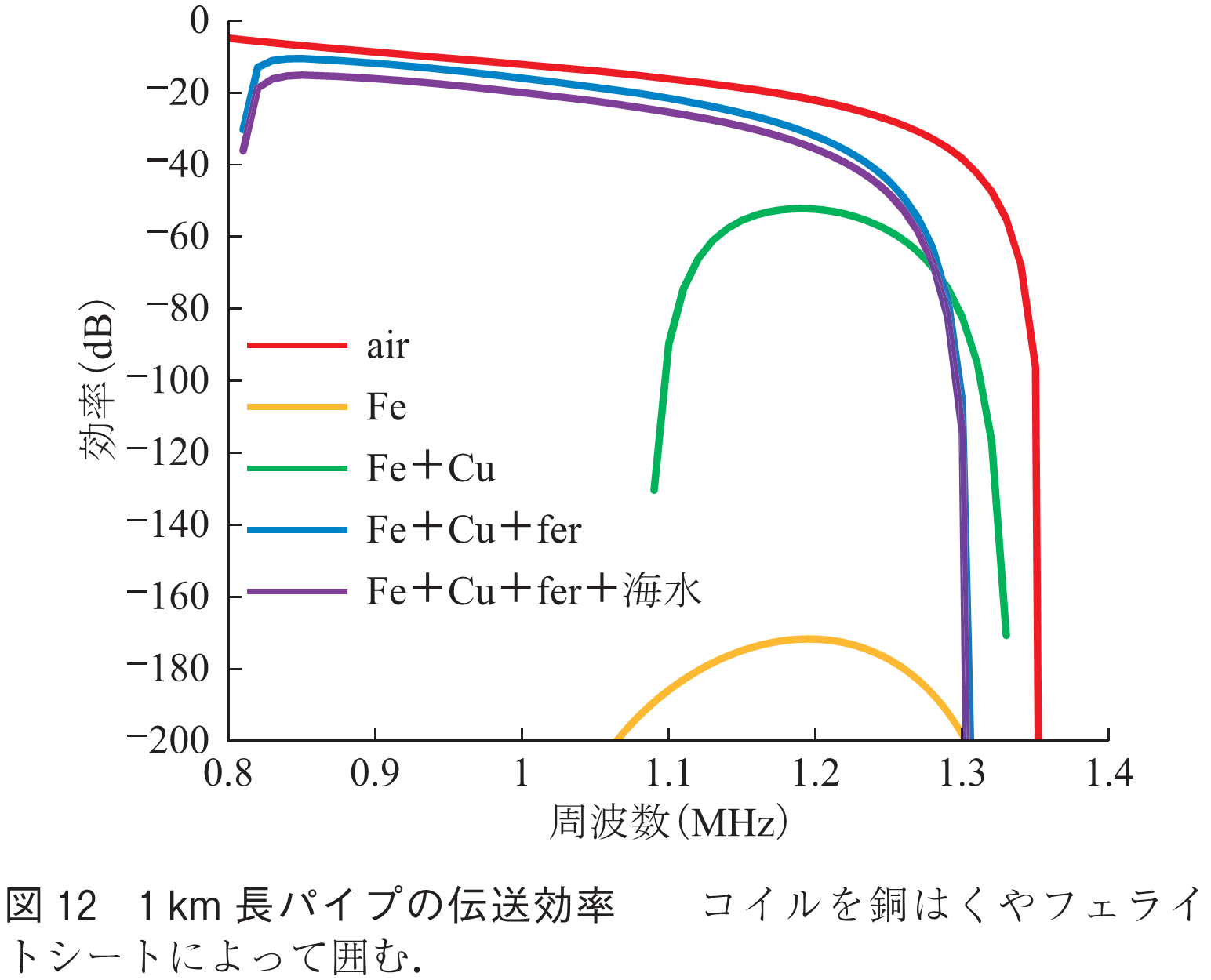
長さ10mのパイプを100本継ぎ足して接続端はコイル結合とし,パイプ内は同軸ケーブルを使って電力を送った場合の計算結果を図12に示す.当然ながらコイルが鉄パイプから取り外されて仮に空気中にある(air)と仮定すれば非常に低損失である.しかし鉄パイプ内にコイルを挿入する(Fe)と猛烈な渦電流損を被り,コイル部分を銅はくで取り巻く(Fe+Cu)と一気に損失は減少するが鏡像効果によってインダクタンスが減少するために動作帯域が上昇している.そこで銅はくとコイルの間にフェライトシートを挿入し(Fe+Cu+fer)て磁力線をフェライト内に取り込むことによって,鏡像効果を除去し動作帯域を下げフェライトの損失の少ない帯域で動作させて更に損失を下げることができている.
この構造のままで実験確認するのは困難なので,1周期長20cm,周期数5の伝送系を現実の鉄パイプに入れて実験を行いシミュレーション結果の妥当性を確認した.今後は主としてコイル結合部の改善すなわち,巻き数,付加コンデンサ,フェライト材,各素子の配置などの最適化によってどこまで減衰を減らせるかを調べ,世界初の壮大な海底掘削ドリルパイプ給電実現に向けて研究を進めたいと思う.
紙数の関係で詳しく説明できなかったが,無線給電には限りない夢がある.その証拠に弊社で研究に携わった龍谷大学生は例外なく夢中で研究し,すばらしく成長して卒業した.私は働けなくなるまでこれを続けたいと願う.
(1) “小特集近距離無線電力伝送技術の新展開,”信学誌,vol.95, no.1, pp.33-55, Jan. 2012
(2) T. Assaf, C. Stefanini, and P. Dario, “Autonomous underwater biorobots,” IEEE Robot. Autom. Mag., pp.26-32, Sept. 2013.
(3) 粟井郁雄,澤原裕一,山口和也,堀田昌志,石崎俊雄,“水中のワイヤレス給電に関わる幾つかの新しい現象,”信学論(B), vol.J96-B, no.11, pp.1284-1293, Nov. 2013.
(4) 粟井郁雄,澤原裕一,山口和也,石崎俊雄,“WPTガイドによる長距離ワイヤレス給電,”信学技報,MW2013-15, pp.29-34, June 2013.
(5) 大塚麻以,居村岳広,藤本博志,堀 洋一,“金属壁を介したワイヤレス電力伝送の高効率化に向けた回路構成に関する基礎検討,”信学技報,WPT2016-48, pp.33-38, Jan. 2017.
(6) 平岩達也,川辺健太朗,石崎俊雄,粟井郁雄,“磁界結合型WPTシステムの電界制御法,”信学技報,WPT2016-31, pp.67-72, Oct. 2016.
(7) 粟井郁雄,澤原裕一,石崎俊雄,“磁界結合共振器WPTシステムによる隔壁給電,”信学技報,WPT2014-19, pp.97-102, April 2014.
(8) 二神 大,澤原裕一,石崎俊雄,粟井郁雄,”スパイラル共振器を用いた海中WPTシステムの伝送特性,”信学技報,WPT2014-60, pp55-60, Nov. 2014.
(9) 川辺健太朗,二神 大,張 陽軍,石崎俊雄,粟井郁雄,“スパイラル共振器の無負荷Qに対する塩水の影響,”信学技報,WPT2015-60, pp.73-78, Nov. 2015.
(10) I. Awai, Y. Ikuta, Y. Sawahara, Y. Thang, and T. Ishizaki, “Applicaions of a novel disk repeater,” Proc. 2014 WPTC, no.T-Fr3-6, pp.114-117, May 2014.
(11) 川辺健太朗,張 陽軍,粟井郁雄,“ディスクリピーターを用いた多関節アームロボットへの新しい非接触給電法,”信学技報,WPT2016-23, pp.19-24, Oct. 2016.
(12) 伊藤竜次,石崎俊雄,井上朝哉,石渡隼也,粟井郁雄,”周期構造理論に基づいた海底掘削ドリルへのWPTシステム,”信学技報,WPT 2016-71, pp.31-36, March 2017.
(平成29年3月29日受付 平成29年5月31日最終受付)

■ 用 語 解 説


 積
積  と
と の積.前者がどれだけ早く隣の共振器にエネルギーを運ぶか,後者がその間に受ける損失がどれだけ少ないかを示すのでこの積が大きいほど高効率給電ができる.
の積.前者がどれだけ早く隣の共振器にエネルギーを運ぶか,後者がその間に受ける損失がどれだけ少ないかを示すのでこの積が大きいほど高効率給電ができる.
続きを読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()