|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
解説
宇宙機の軌道・姿勢制御技術
Orbit and Attitude Control for Spacecraft
A bstract
今後の宇宙開発では,複数の宇宙機が相対位置と姿勢を協調制御してミッションを行うフォーメーションフライトや,可能な限り短時間でペイロードを多数の目標方向に繰り返し指向させる敏しょうな姿勢変更が考えられており,これらを達成するには,宇宙機自身の運動の非線形性や外乱,推力やトルクを出力するアクチュエータ特性を考慮した制御が必要になる.本稿では,筆者の研究成果も交えて宇宙機の位置・姿勢制御手法について紹介する.
キーワード:宇宙機,軌道・姿勢制御,アクチュエータ特性,非線形制御
今後の宇宙開発では,複数の宇宙機が相対位置と姿勢を協調制御してミッションを行うフォーメーションフライト(1)や,可能な限り短時間でペイロード(用語)を多数の目標方向に繰り返し指向させる敏しょうな姿勢変更を伴うミッション(2)が考えられている.これらのミッションでは,衛星間相対距離の制御精度がnm~µmという超高精度制御や10秒間で30度の角度変更という高速姿勢制御が要求される.これらの要求を実現するためには,宇宙機の非線形運動や推力,トルクを出力するアクチュエータの特性を考慮した制御系設計が必要になる.本稿では,筆者らの研究成果も交えて宇宙機の軌道・姿勢制御手法について紹介する.
本章では,地球近傍での宇宙機の軌道と姿勢運動について,文献(3),(4)に基づいて概説する.
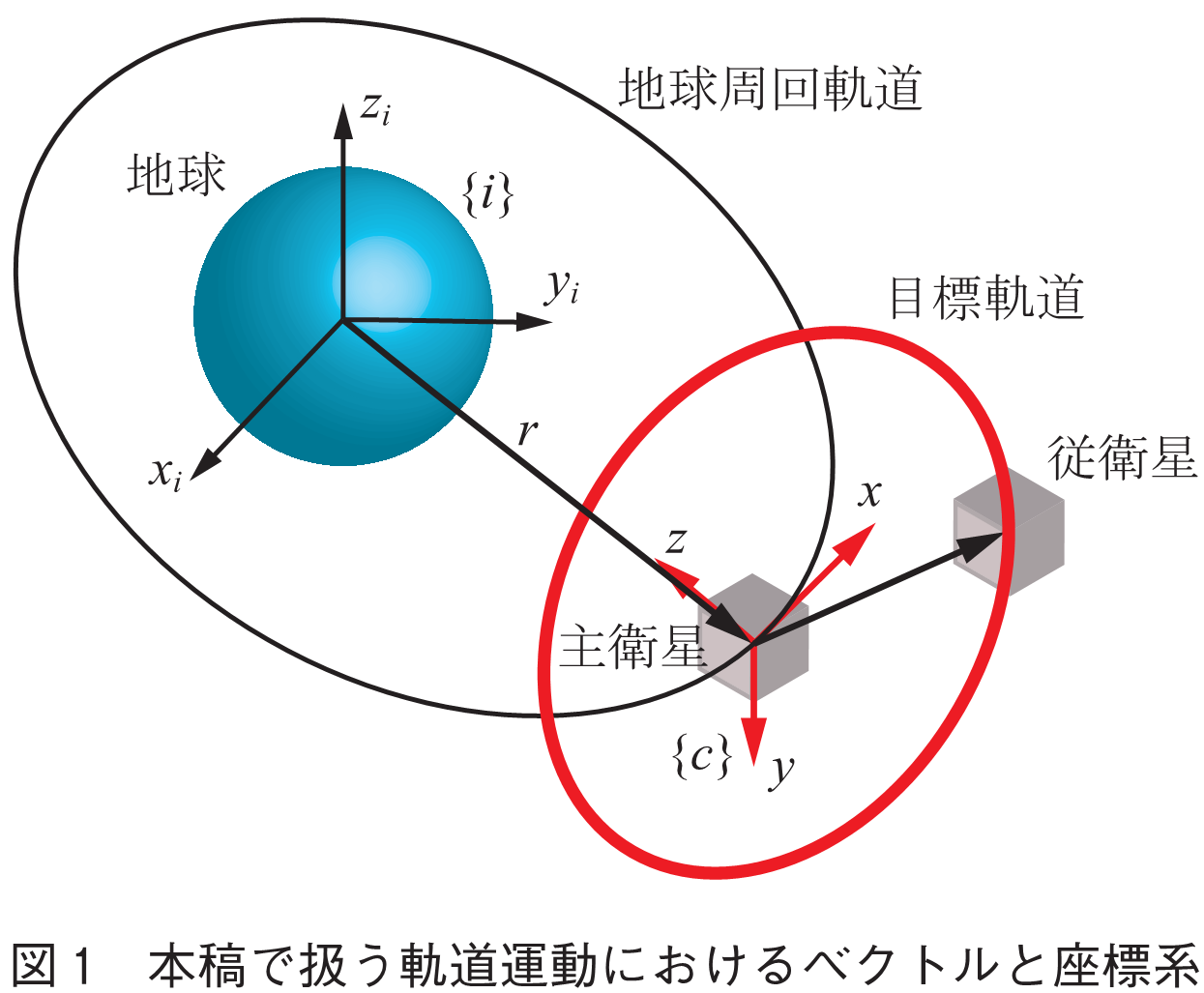
本稿では,地球周回軌道(円またはだ円)を航行しているchief(以下,主衛星)の周辺に設定された軌道にdeputy(以下,従衛星)が追従する制御問題を考える(図1).ここで, は慣性座標系,
は慣性座標系, はLVLH系(Local Vertical Local Horizontal frame.
はLVLH系(Local Vertical Local Horizontal frame. 軸:軌道面内進行方向.
軸:軌道面内進行方向. 軸:軌道面外方向.
軸:軌道面外方向. 軸:地心方向),
軸:地心方向), は地球中心から主衛星までの位置ベクトル,
は地球中心から主衛星までの位置ベクトル, は主衛星に対する従衛星の相対位置ベクトルである.
は主衛星に対する従衛星の相対位置ベクトルである.
主衛星は軌道高度700km以下の低軌道を航行しているとする.低軌道では地球扁平性による重力摂動( 項)と空気抵抗の影響が大きい(5)が,主衛星については何らかの制御で補償されているものとする.このとき,
項)と空気抵抗の影響が大きい(5)が,主衛星については何らかの制御で補償されているものとする.このとき, における主衛星の運動方程式は
における主衛星の運動方程式は

(1)
となり,その軌道運動(ケプラー運動)は

となる.ここで, は地心重力定数,
は地心重力定数, は軌道の形状を表す離心率(
は軌道の形状を表す離心率( のとき円軌道.
のとき円軌道. のときだ円軌道),
のときだ円軌道), はだ円軌道長半径(
はだ円軌道長半径( のとき
のとき ),
), は真近点離角,
は真近点離角, は平均軌道角速度である.
は平均軌道角速度である.
続きを読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()