|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
国立研究開発法人情報通信研究機構(NICT)と国立研究開発法人産業技術総合研究所(産総研)は制御用の電波が直接届かない場所にあるロボットを他のロボットを経由して遠隔制御し,かつその状態を遠隔監視する通信遅延時間保証形マルチホップ無線通信システムを開発した.
ドローン(無人航空機)や災害用地上ロボットなどをマルチホップ通信で遠隔制御するための技術はこれまでも存在しているが,多くの場合インターネットアクセス用やセンサネットワーク用の2.4GHz帯による無線技術が流用されており,通信遅延時間及びその揺らぎの問題や電波伝搬距離の問題からロボットの遠隔制御には本来適していないという課題があった.
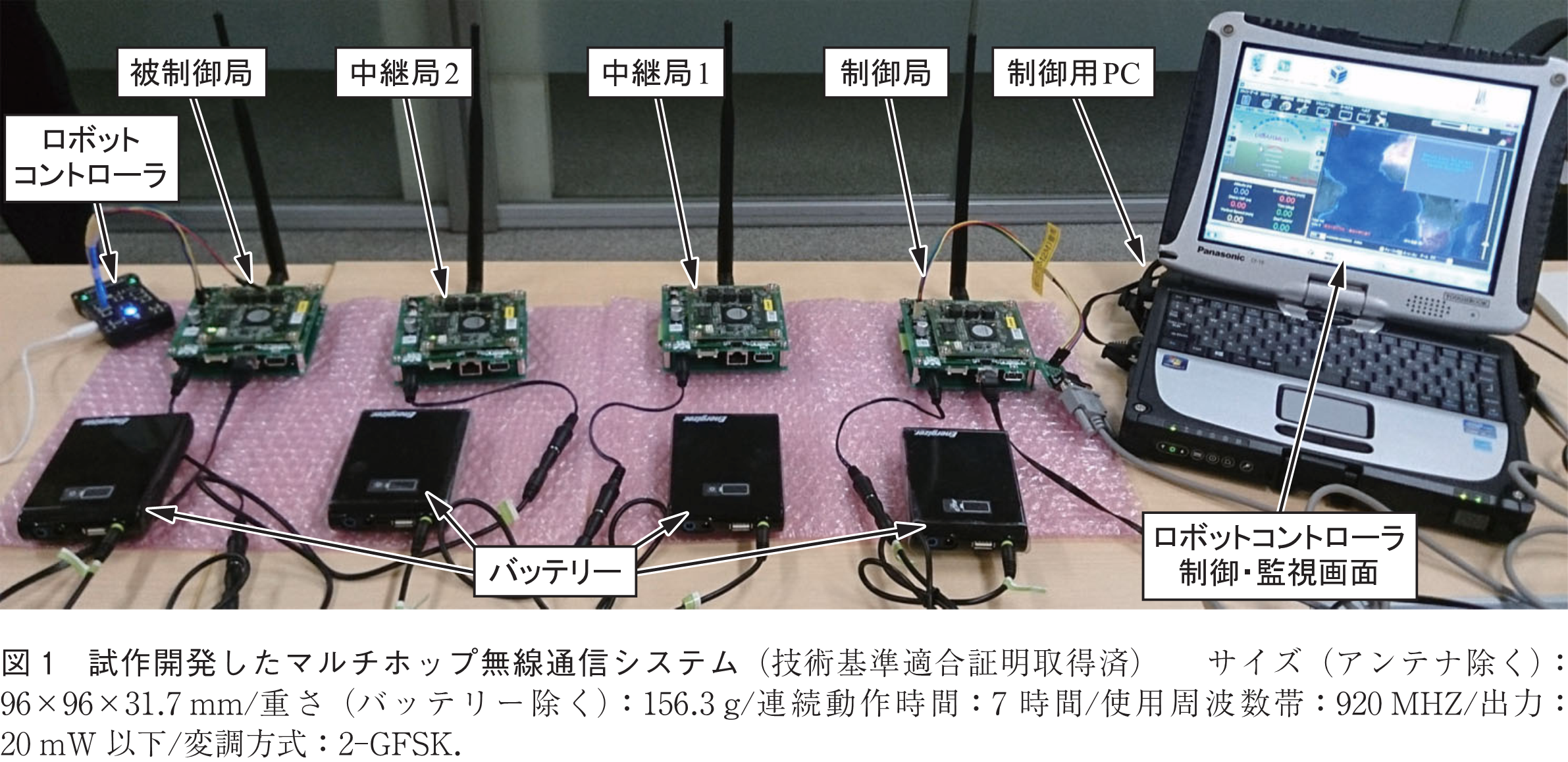
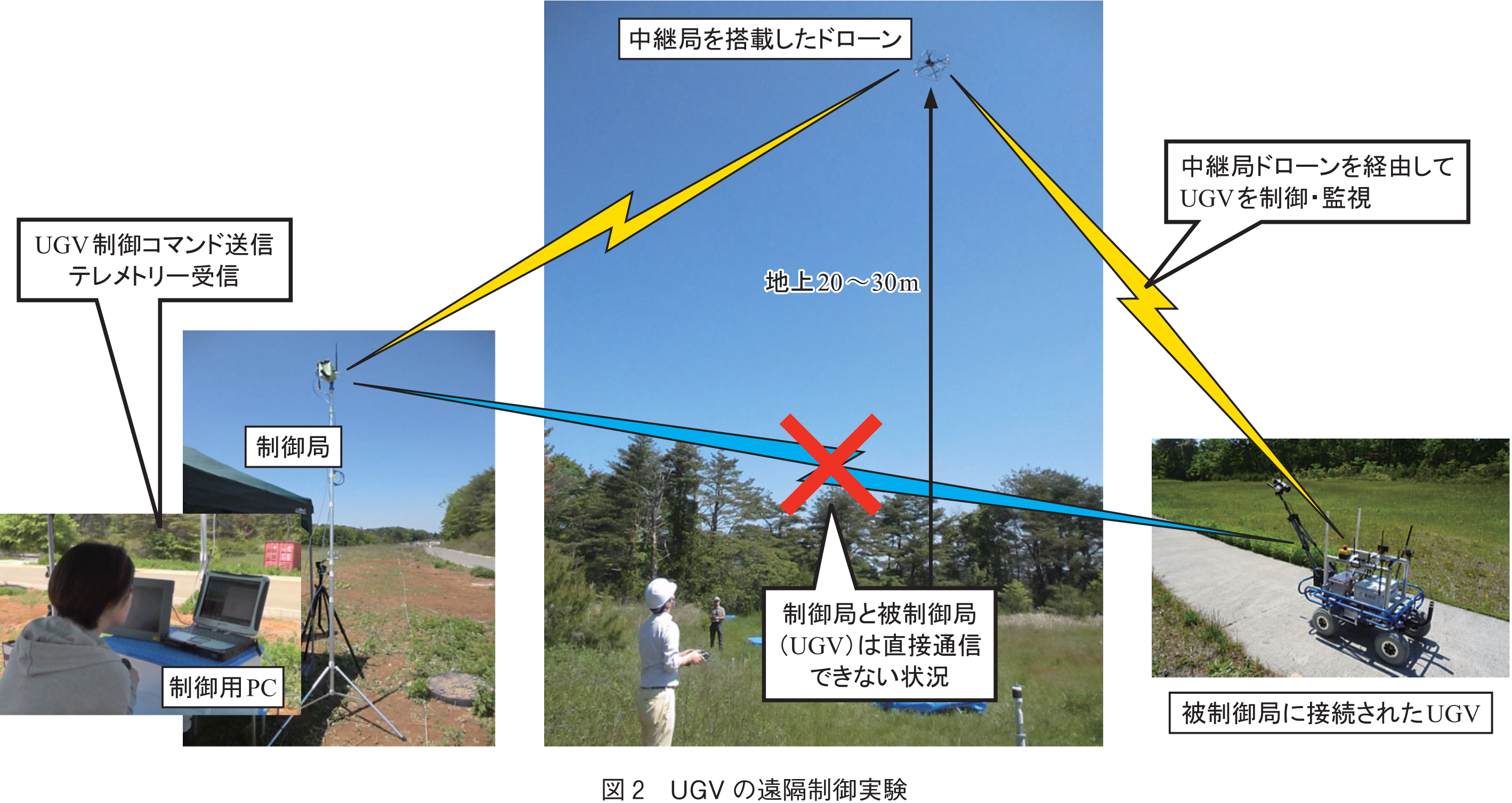
そこでNICTと産総研では,電波伝搬距離が比較的長い920MHz帯を用いたマルチホップ無線通信により通信可能距離の拡大及び通信経路の冗長化を図り,更に時分割多元接続(TDMA)方式により通信遅延時間があらかじめ設定した一定値以内に収まるよう設計したマルチホップ無線通信システムを開発した.今回試作開発したマルチホップ無線通信システムは被制御局1台,中継局2台,制御局1台,制御用PCで構成される.被制御局は制御対象となるロボットのロボットコントローラに接続され,制御局及び中継局経由の通信で制御用PCから遠隔制御及び遠隔監視される(図1).また,本試作システムを用いて小形無人地上車両(UGV: Unmanned Ground Vehicle)の遠隔制御実験を実施し,遅延時間が一定値内に保たれたマルチホップ無線通信経由で制御局から見通し外にあるUGVを遠隔制御できることを確認した(図2).
続きを読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
「電子情報通信学会 - IEICE会誌」アプリをダウンロード

![]()