|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
abstract
移動通信システムは小セル化による大容量化を続けている.一方,少子高齢化の進む日本において,労働力を確保することが重要になりつつある.本稿では,この二つの事象がつながるような,超スマート社会における人間形ロボットの活用についての考察を行う.移動通信システムの発展形態を説明し,将来の基地局がロボットになることを述べる.そしてそのロボットを人間のモバイルセルフエージェントとしても機能させ人の様々な分身活動を行うことにより,労働力の向上を実現することが可能であることを,同時会議システムの例を示しながら説明する.
キーワード:移動通信システム,超スマート社会,ピコセル基地局,モバイルセルフエージェント,NINJA
日本の人口は2016年時点で1億2,700万人であるが,2050年には9,900万人程度となる予測がなされている.この少子高齢化が進む現在の日本において,労働人口の減少が危惧されている.人材を国外から受け入れる議論も盛んに行われているが,一方で労働の効率を向上させることも重要であると考えられている.この実現に寄与するものがICT(Information and Communications Technology)技術であり,特にIoT(Internet of Things)利活用である.空間上に多量に配置されたIoTのセンサデバイスからの情報をクラウドサーバ上に伝送し,ビッグデータを解析し特徴抽出を行い,実世界のシステム機器やIoT端末へフィードバックすることで,情報処理サイクルが実現する.このサイクルを活用することで極めて高い分解能での知的情報空間を提供することができ,これまでにないサービスやアプリケーションを実現することが可能と考えられている.これによる社会の安全・安心・快適を実現するものが超スマート社会である.超スマート社会において,この知的情報空間を幅広い産業分野に適用することにより,一人当り,時間当りの生産効率を大幅に向上させ,労働力不足を補うことが考えられる.労働力不足が理由でないにせよ,既にIoT端末の普及は始まっており,実空間とサイバー空間の融合が進んでいる.このとき,このIoT端末において移動端末の持つ役割は大きい.車やロボット,ドローン等は移動体であるため,モバイル情報伝送が行えなければ,リアルタイムな知的情報空間の構築ができない.この移動体通信は有線では実現できず,無線通信の利用が必須となる.
現在の世界の携帯電話は80億台程度であるが,IoTの台数は2020年には300億台と予想されており,爆発的に増加するIoT端末との無線通信を実現するシステムの構築が急務となっている.この無線トラヒックの増加は,1979年に第1世代移動通信システム(1G)が実用化されてから40年程度継続的に続いており,今後も20~100年程度継続することは容易に推測される.現在ではこの大容量化のために,第5世代移動通信システム(5G)の標準化団体・プロジェクトにおいてIoT通信を収容するシナリオが議論されている.
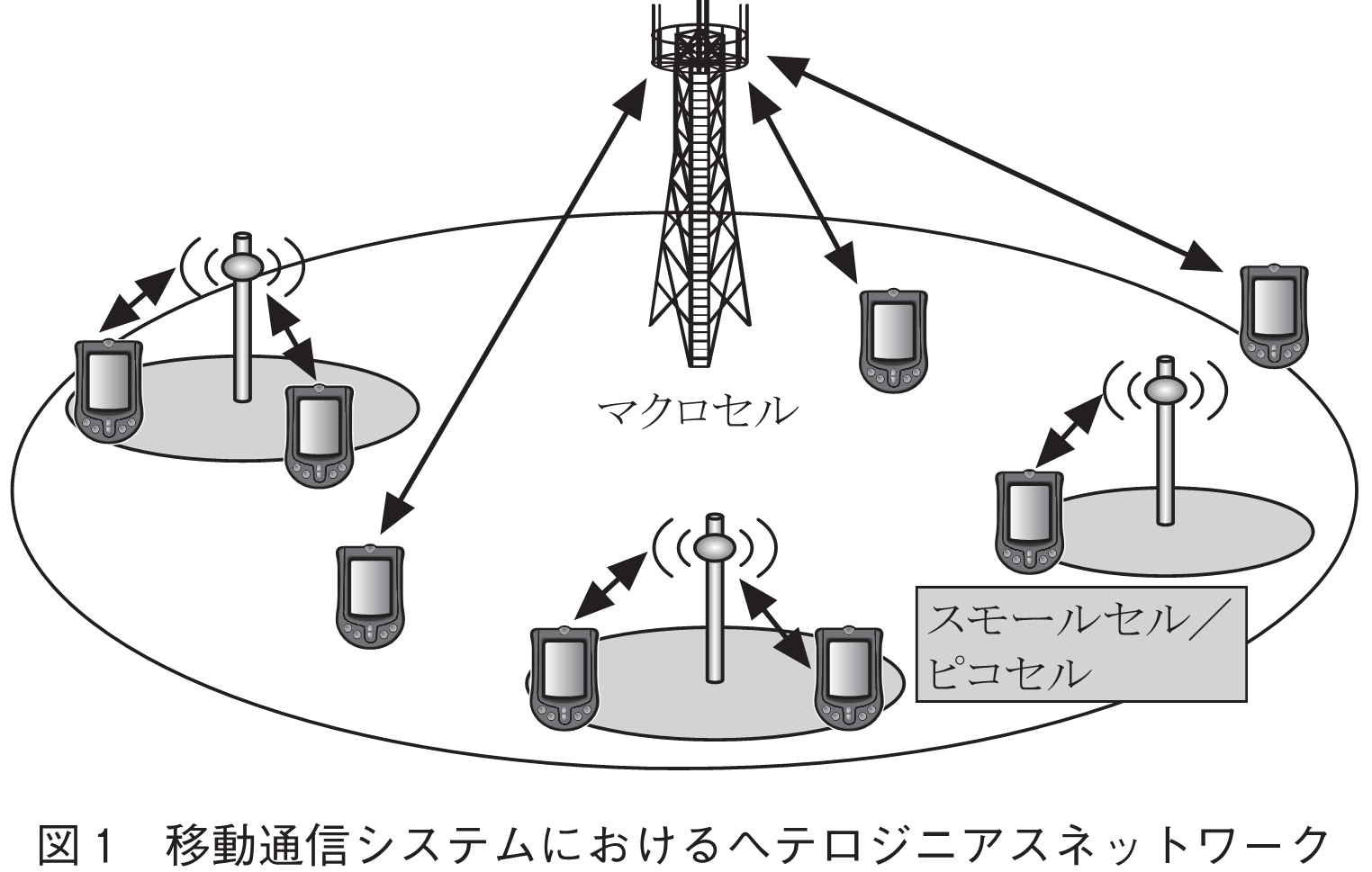
図1にシステム容量を増加させるための,5Gにおけるヘテロジニアスネットワークの概念図を示す.第4世代移動通信システム(4G)以降ではマクロセル基地局を中心とした広域なセルに,重畳的に狭域なスモールセル/ピコセルの基地局を配置するヘテロジニアスネットワークが用いられている.そして同一か異なる周波数帯を用いて,基地局はより近傍のユーザ端末との接続を収容する.スモールセル/ピコセル内のユーザはそのスモールセル/ピコセル基地局に接続することで,無線区間距離を減らしてパス損を低減させることができ,その結果,受信側の信号対雑音電力比が増加するためスループットが向上する.この大容量化ヘテロジニアスネットワークにより,超多数IoT端末接続も実現される予定である.このとき,用いる周波数が高いほど帯域幅も広げることができるため,更なる大容量化が実現されるという特徴がある.この特徴を生かすため,5Gではスモールセル/ピコセルが用いる周波数をSHF帯(3~30GHz)やEHF帯(30~300GHz)の高い周波数帯にすることで広い信号帯域幅を確保し,Gbit/s級の通信を実現することが計画されている.しかし同時に,用いる周波数が高くなるほど距離減衰が増加するため,基本的にセル半径は小さくなる.現在の一般的な数値としては,4Gにおいてマクロセル半径が500m程度,スモールセル/ピコセル半径が数十~100m程度である.0.3kbit/s相当のアナログ通信であった1Gのセル半径が5~10km程度であったことを踏まえると,総じて移動通信システムは世代の深化に伴い,セルの狭域化と広帯域化が進んでいると言える.
一方,無線トラヒックの時間的・空間的な偏在化も次第に顕著になっており,スモールセル/ピコセル基地局の位置の最適化が重要になっている.例えばスタジアムでは試合のあるときのみ多数の人が集まり,試合が盛り上がった瞬間にソーシャルネットワーキングサービス投稿や,動画像アップロードのための雷サージのようなトラヒックが発生する.このような偏在化に対処するため,現在では車載基地局と人間Wi-Fi(人間中継局)などが展開されており,安定した無線アクセスを提供している.
以上のような現状を踏まえると,将来移動通信システムでは,テラヘルツ帯や光を含む更なる高周波帯を用いて超大容量ピコセルを展開する,時間的・空間的に適応的な可搬形若しくは可動形基地局が広まっていくと考えられる.
この要求を満たす将来のロボット形ピコセル基地局を図2に示す.頭部に,近くに存在する有線バックボーンとの固定無線接続口(張り出し中継局.例えば電柱に存在する)と接続するための高周波アンテナ若しくはレンズを具備しており,更に半径数~数十mのピコセルを展開するための無線アクセス用の高周波アンテナ・レンズも有している.これにより近隣の無線端末ユーザやIoT端末を収容するピコセル基地局として機能する.更に人間形ロボットにすることで車載基地局が入り込めない狭い道路も自律的に移動でき,時間的・空間的に最適な置局を実現する.このロボットを多数配置し中央制御局が各ピコセル基地局の位置の最適化を行うことで,場所,時間によるユーザのスループット低下を完全になくすことが可能となり,無線アクセスシステムはベストエフォート形からギャランティード形に変化する.

1.で述べた少子高齢化による労働力の減少に対して,IoTの利活用による直接的な労働力向上の施策が考えられる.現在のところ,ある人の英知を直接用いることができるのは本人だけであり,他者への英知の伝達は指導や書物などの間接的な手法を取ることしかできない.この「他者」が今後減少するので,「本人」が増えれば問題が解決する.この本人をモバイルセルフエージェントとして,IoT端末により実現することを考える.
図3にモバイルセルフエージェントNINJA(New INtelligent Japanese-style Agent)を示す.これは人間形のロボットであり,ある人にひも付けられている.そしてその対象者の経験や知識を無線通信を通して定期的に入力し,更にロボット自身の体験もビッグデータとして絶えず入力する.これらのデータに対し機械学習を行うことで,搭載されているAI(Artificial Intelligence)の能力が向上し,徐々に対象者の行動や仕草,判断をまねることができるようになる.また外見も必要に応じて本人のサイネージを表示する(1).すなわち,一言で表すとディジタル分身の術である.これが「本人」の増加であり,このNINJAが活動することで,対症療法的ではあるが少子高齢化社会の労働力増加の実現に貢献することができる.主に知的活動の方が利用しやすいと予想されるが,ロボットの機械的能力向上により,肉体的活動の模擬も可能となるかもしれない.図から分かるように,実はNINJAは図2のピコセル基地局も兼ねており,無線通信による超スマート社会の知的情報空間構築にも役立っている.このように今後の社会は無線通信システムを利活用することで,実空間における人とロボットのヘテロジニアスネットワークも構築されると予想される.

なおNINJAはロボットであり人の対象者の切換が可能であるため,占有でなくても共有でもよい.普段はピコセル基地局として街の屋内外で最適置局のために停留したり移動したりしており,人の要求によりエージェント機能も起動することなどの利用シーンも考えられる.
NINJAの分身の活用による新たなシステム・アプリケーション展開の可能性は極めて幅広いが,ここでは初期の活用例の一つとして同時会議システムを紹介する.図4に同時会議システムの概念を示す.このシステムは分身により本人を二人以上にして複数の会議に同時に参加することが目的である(図は三つの例).簡単のため図中ではNINJAはピコセル基地局ではなくIoT端末ロボットとしてのみ動作している.会議では外見もサイネージで対象者のように表示し,人間参加者の違和感や混同をできるだけ抑える.ただし全員がNINJAの場合,サイネージは任意である.
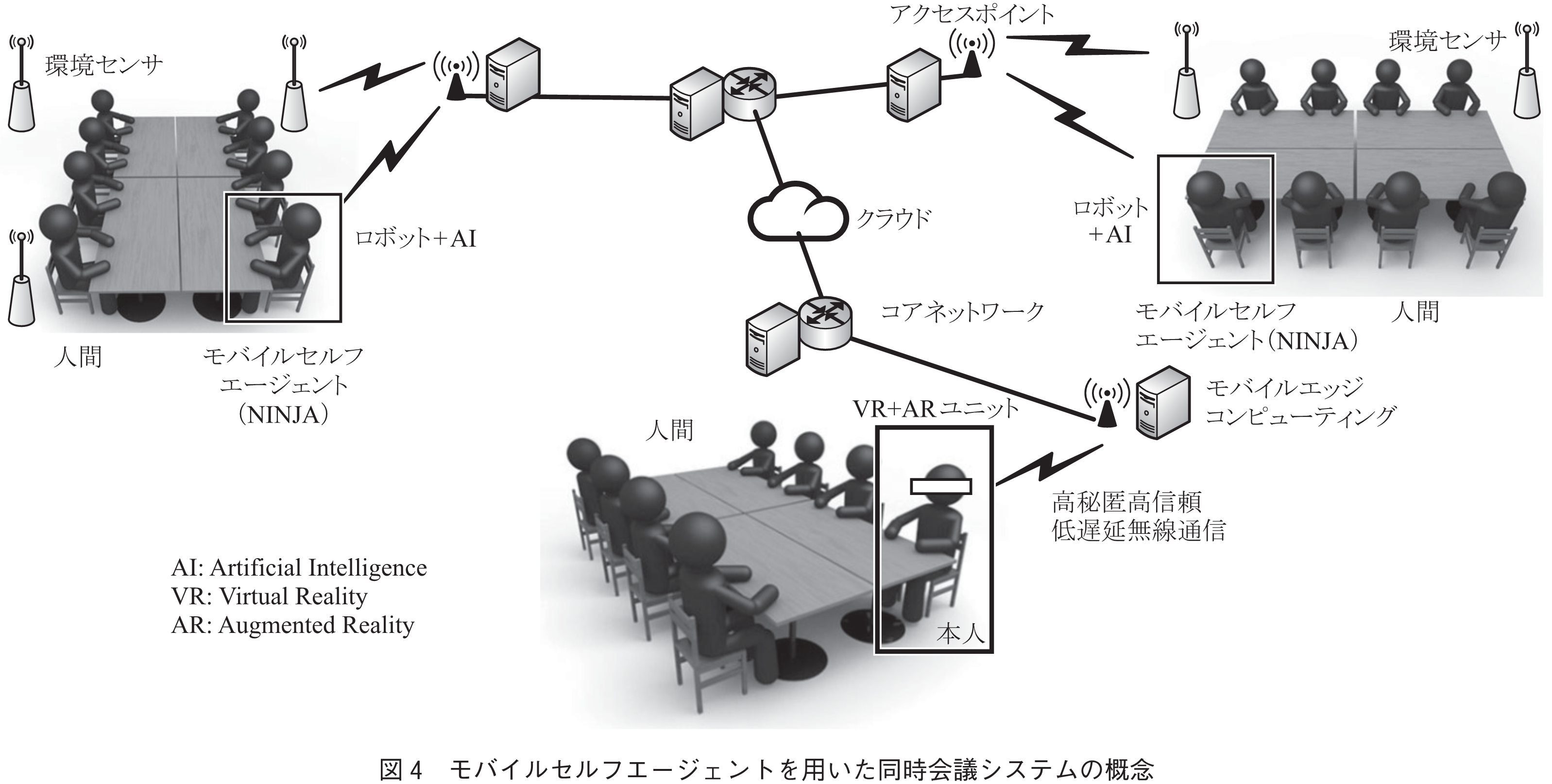
会議中搭載AIに会話が入力され,ある程度会議内容に対して判断を行う.その判断領域も機械学習により会議経験を積むことにより本人にとって最適化されていく.すなわちより本人の分身に近くなる.この学習と判断はNINJAの自律的機能が中心になるが,必要に応じてネットワーク側のモバイルエッジコンピューティング等も利用される.図のように一つの会議に参加している本人はVR(Virtual Reality)・AR(Augmented Reality)を活用することで,遠隔地会議も現地体験が可能となる.従来の遠隔会議のようなカメラや音声だけでなく,触覚インターネットを活用することで触覚や嗅覚もNINJAの体験を通じて現地と高度に共有できるような仕組みが設けられている.そして本人のVR・AR装置の選択会議先を逐次切り換えることにより,時分割で(広義の意味では同時に)複数会議の参加を実施することが可能となる.このとき分身はある程度会議内容について判断できるため,全ての情報を伝送する必要がなく,要約,簡易表現を本人装置に伝達する(2).この分身の概念の実現により,図4では3倍と,一人当りの生産性の向上に寄与することができる.
このシステムを実現するためには,移動体における低遅延,安全,高信頼な伝送を可能とする,5G以降のギャランティード形移動通信システムの実現が必須である.
NINJAによるディジタル分身の術を用いる際の大きな課題は,現在の倫理的感覚では,人は自分と他人の分身に恐怖感や嫌悪感を持つ懸念があることである.なぜならどこまでの範囲が「自分」「人」であるかという,自我の拡大に関する新しい概念の考察を強いられるからである.極端な例では,ある人が死亡した後もその人のNINJAは存在できるので,他者はそのNINJAをどのように扱うかなどの統一解が困難な問題が発生する.しかしながら技術と人は,人のライフスタイルの変化に合わせていつの時代も相互に歩み寄っていくことが常であるため,分身も当然のように使いこなされていくかもしれない.その場合,自我が明確に線引きできる範囲内でのみ分身が活動するようなNINJAの機能抑制を行うこともあり得,逆に列車の中央制御室のように,人は思考・管理活動を中心に行い,NINJAのみが空間的活動の中心になることも考えられる.
もう一つの課題は,NINJAを本章のような労働力補塡の目的に使用しても,本質的には若者の希望を鼓舞できないことである.この状態では少子高齢化の解消に貢献できない.そのため若者や子供に将来への希望を持ってもらうような,システムやアプリケーションの創出が必要である.一例としてはNINJAを用いた実空間リアルタイムゲームや,参加型VR・AR体験ドラマ,人と他者のNINJAによる一人当り数百~1,000組合せの結婚試行などが考えられるが,斬新なアイデアの適用により無限の可能性を有している.
本稿では,移動通信システムの今後の発展形態と,そのシステムを用いた超スマート社会における人間形ロボットの活用についての考察を行った.無線伝送の減衰を抑制するために,移動通信システムのセル半径が小さくなっている状況を述べ,その方向に進む前提においては将来的に可動形のピコセル基地局が人間形ロボットになることを述べた.そして,そのロボットは人間のモバイルセルフエージェントNINJAとしても機能することができ,人の様々な分身活動を行うことができることを説明した.このシステムにより,労働力の向上を図ることが可能であることを,同時会議システムを一例として説明した.NINJAができることは多岐にわたるため,人の倫理や道徳感を損ねないような範囲での支援活動を実現させると,超スマート社会を更に進化させることができると考えられる.
なお本稿は各文末が伸びることを防ぐため断定的な表現で記述されているが,もちろん未来予測であるため,進化の一可能性を述べたものである.
(1) 藤子・F・不二雄,“コピーロボット,”ドラえもんカラー作品集第2巻(てんとう虫コミックススペシャル),pp.89-95,小学館,東京,Dec. 1999.
(2) 星 新一,“肩の上の秘書,”ボッコちゃん,pp.217-223,新潮社,東京,May 1971.
オープンアクセス以外の記事を読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()