|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
解説
高周波数帯V2Xの実現に向けたセルフリーモビリティネットワーク構築の取組み
Efforts toward the Realization of a Cell-free Mobility Network for High-frequency V2X
A bstract
本稿では,高周波数帯V2Xの実現に向けた取組みとして,O-RANフレームワーク及び複数の路側機による協調ビームフォーミングを活用した協調型自動運転向けの次世代無線通信システムを提案する.特に,高速移動車両との安定した通信に資するビーム追従/ヌル形成方式と,実環境に近い通信評価を行うことを目的としたワイヤレスディジタルツイン環境について詳細に解説する.提案技術を用いることで,高速に時間変動する電波伝搬環境におけるハンドオーバ制御や遮蔽予測の精度向上が期待される.今後は,シミュレーション評価からより現実的な応用シナリオを想定したエミュレーション評価を行い,実機実証へと評価を進める予定である.
キーワード:V2X,O-RAN,ミリ波,ビームフォーミング,ディジタルツイン
増大するモバイルトラヒックを限られた周波数資源下で効率的に収容する手段として,基地局のスモールセル化が有効である.第5世代移動通信(5G)では,新たに4~5GHz帯の周波数(Sub6)と28GHz帯の周波数(ミリ波)が割り当てられた.基地局展開においてSub6の基地局数は増加する一方で,ミリ波は一部の国では周波数が返上され,我が国においても基地局展開数がいまだ伸び悩んでいる状況である(1).これは,波長の短いミリ波は,空間伝搬時の単位距離当りの減衰量,遮蔽による減衰が大きいため,MIMOやビームフォーミングが十分に機能せず,大容量かつ低遅延といった本来のメリットを十分に発揮できていない.これが一因となり,デバイス機器メーカはミリ波のサポートを断念し,それに伴いインフラの展開も進まず,ミリ波の普及が停滞するといういわば負の循環が生じている.これを克服するには,ミリ波の展開を容易にする技術開発とともに,新たなユースケースの創出が求められる.
ミリ波を含むBeyond 5G/6Gについて,コンシューマ向けには現状のセルラシステムで既に一定の利便性が提供されていることから,現在は産業向けの検討が活発化している.その一つに,自動運転への適用が期待されている.現在実用化に向けた開発が進んでいる自律型自動運転は,本来運転している人間の処理をそのまま置き換えるものであり,局所的な情報に基づき走行するため,人間による運転と同一の限界が存在する.そこで様々な交通システムが協調して認知・判断・実行を行う「協調型自動運転(2)」の実現が期待されている.その鍵となるのが,通信機能を備えた協調型インフラである.協調型インフラにおいて車両と路側機をはじめ,様々な装置が接続されるこの概念は,V2X(Vehicle-to-Everything)と呼ばれる.V2Xの無線接続部分にミリ波帯を活用した高速大容量通信を用いると,抽象的な物標情報ではなく生のセンサデータを共有させることで高度な協調型自動運転が実現される.しかし,既存のミリ波5G方式にてこれを実現した場合,制御信号によるビーム探索は20ms間隔との規定があり,更に当該制御信号フレームの中で探索可能なビーム方向数には制限があるため,探索処理を複数フレームにわたり実施する必要がある.特に車両が移動する環境においては,その間に伝搬路の状態も変化してしまうことから,既存の方式では移動する車両に対し安定してビームを向け続けることは困難である.そのため,ミリ波帯では安定した通信接続ができず,より低い周波数帯との間で切換が頻繁に発生し,通信品質への影響が発生する可能性がある.
現在の5G RAN(Radio Access Networks)においては,特定ベンダによる市場の独占を防ぎつつ,異なるベンダ間での装置相互接続性を高めることで,5Gの普及を促進することが求められている.この課題に対応するため,Open RAN(O-RAN)が世界的に注目されている.O-RANは,RANの機能をオープン化し,マルチベンダ化を促進するとともに,仮想化基盤上でのソフトウェア化を推進する取組みである.こうした流れの中で,国際的な団体である「O-RANアライアンス」が設立され,その技術基準の策定を進めている.更に,2022年12月には,国内におけるO-RAN機器の検証・認証を可能とする設備としてJapan OTICが設立された.本団体において,RANをインテリジェントに制御するRIC(RAN Intelligent Controller)については,「O-RAN Global PlugFest Fall 2022」や「Fall 2022 OpenAirInterface(OAI)North American Workshop」においても一つの重要な技術であると認知されている.特にRICの特徴的な機能の一つとして,RAN以外のアプリケーションとの連携制御が挙げられる.また,RICは,制御の応答時間に応じて,10ms以下で動作するNear Realtime RIC(Near-RT RIC)と,それ以外のNon Realtime RICに分類される.現在,進められている研究開発では,各参加機関にて,RAN側の機能開発についてのみ焦点が当てられており,RAN側と連携するアプリケーション部分については,具体的なユースケースを含めた検討及び実装が示されていない現状がある.そのため,RICの機能を十分に生かすことができるアプリケーションとユースケースの検討,更にその実証が必要である.
上述した背景の下,本研究開発で想定するシステム構成並びに解決すべき課題を図1に示す.これらの課題に対するアプローチとして,筆者らはRAN/V2X協調連携による高周波数帯V2X向け超高速ビーム追従に関する研究開発を推進している(3)~(6).これらの図1の1-1,1-2を本稿の2.で,2-1.2-2を本稿の3.で,3-1,3-2を本稿の4.で,それぞれ紹介をする.
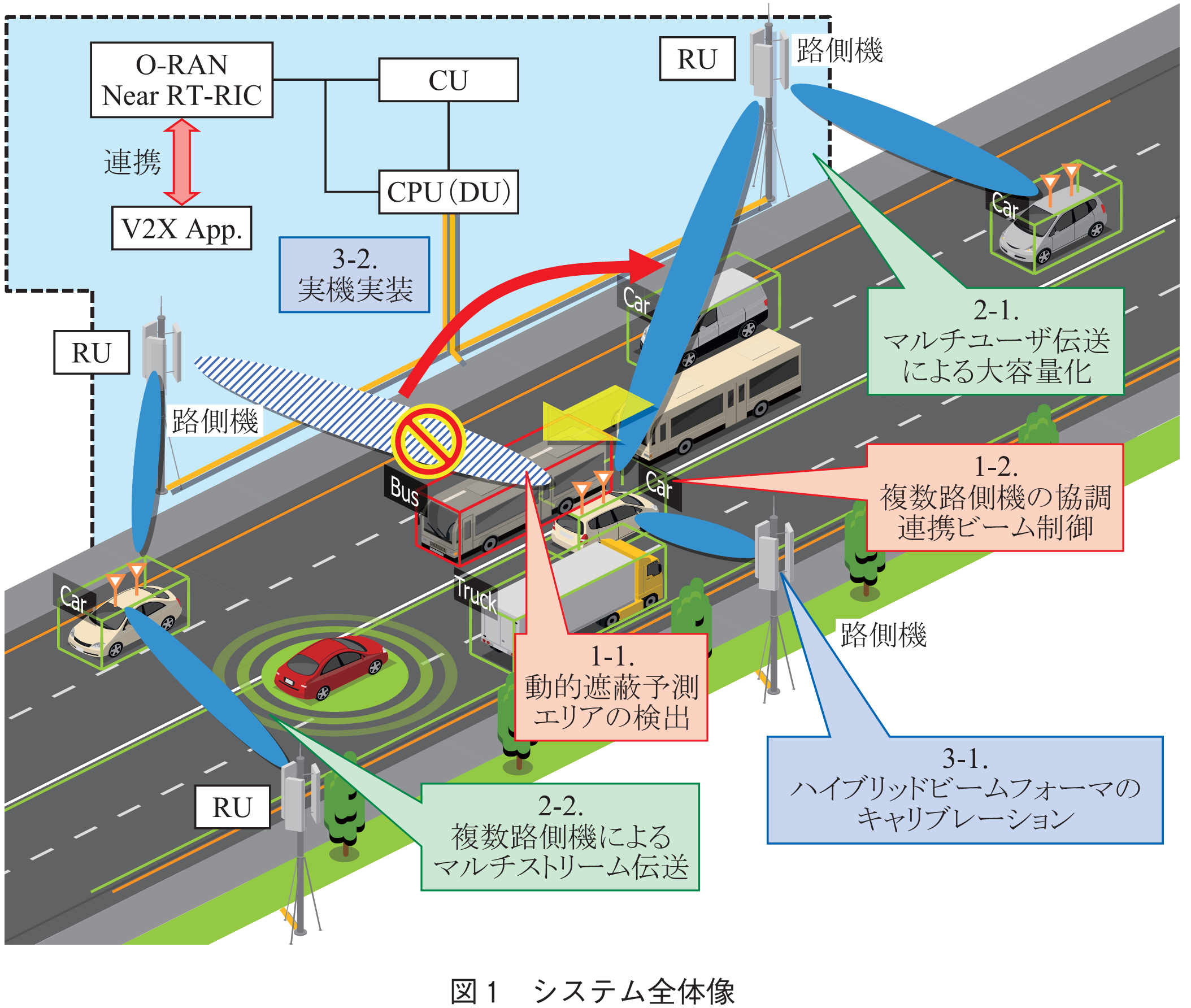
本稿の2.では,O-RANとV2Xを相互連携するためのアーキテクチャを説明する.3.では,無線機を複数の路側機に分散させる多地点でのビームフォーミング手法について説明する.次に4.では,3.までの取組みをより現実空間を考慮した環境で評価するためのワイヤレスディジタルツインの内容を説明する.最後に5.では,まとめと今後の取組みの方向性について説明する.
協調型自動運転とO-RANシステムは,それぞれ独立した技術として発展してきたが,両者が連携することで更なる最適化が期待される.本章では,この連携を実現するためのアプローチについて説明する.具体的には,RICの高速かつ柔軟なネットワーク制御機能を活用し,協調型自動運転に必要な超低遅延・高信頼な無線通信をアダプティブに制御する仕組みを構築する.これにより,車両間及びインフラとの通信品質を向上させ,協調型自動運転の精度と信頼性を高めることを目指す.提案するO-RANとV2Xの連携アーキテクチャでは,協調型自動運転車を利用する状況を想定している.V2XにおけるV2N(Vehicle-to-Network)側には主に協調型自動運転が保持するメッセージを送信し,センサ情報などの大容量通信が必要となるデータ通信ではミリ波V2I(Vehicle-to-Infrastructure)を利用する.図2から,車両の位置や速度情報を含めたCAM(Cooperative Awareness Message)やセンサ側の認識情報を含めたCPM(Cooperative Perception Message)などを常時安定的に送信するために広域なカバレージエリアを提供可能なマクロ周波数側のOpen eNodeB(O-eNodeB)に車両を接続させる.一方で,ミリ波周波数のO-RU(Open Radio Unit)は,ライダ(LiDAR)やカメラなどのセンサとともに路側機(RSU: Roadside-Unit)に搭載されている.ここでミリ波O-RU側はO-DU(Open Distributed Unit)とO-RANフロントホール仕様(7)で接続する.このとき,配下の複数のO-RUにおいてビームフォーミングを行い,O-DUにおいてはO-RUを束ね,集約的な制御・信号処理を行うユニットとする.更に,O-DUとO-CUの間もO-RANミッドホール仕様で接続し,O-CUは分散配置した複数台のO-DUの処理を束ねることでセルフリーネットワークを実現する(8).O-RANにおけるO-DU及びO-CUを制御できる機能としてRICがある.本研究は,ビームフォーミングとハンドオーバの制御シナリオを対象とするのため,Near-RT RICを使用している.また,Near-RT RICでは,外部アプリケーションとの連携を可能とするxAPPとO-DU側のコンフィグを管理するConfig Mgr(Manager)の二つの機能を主に本稿では対象としている.
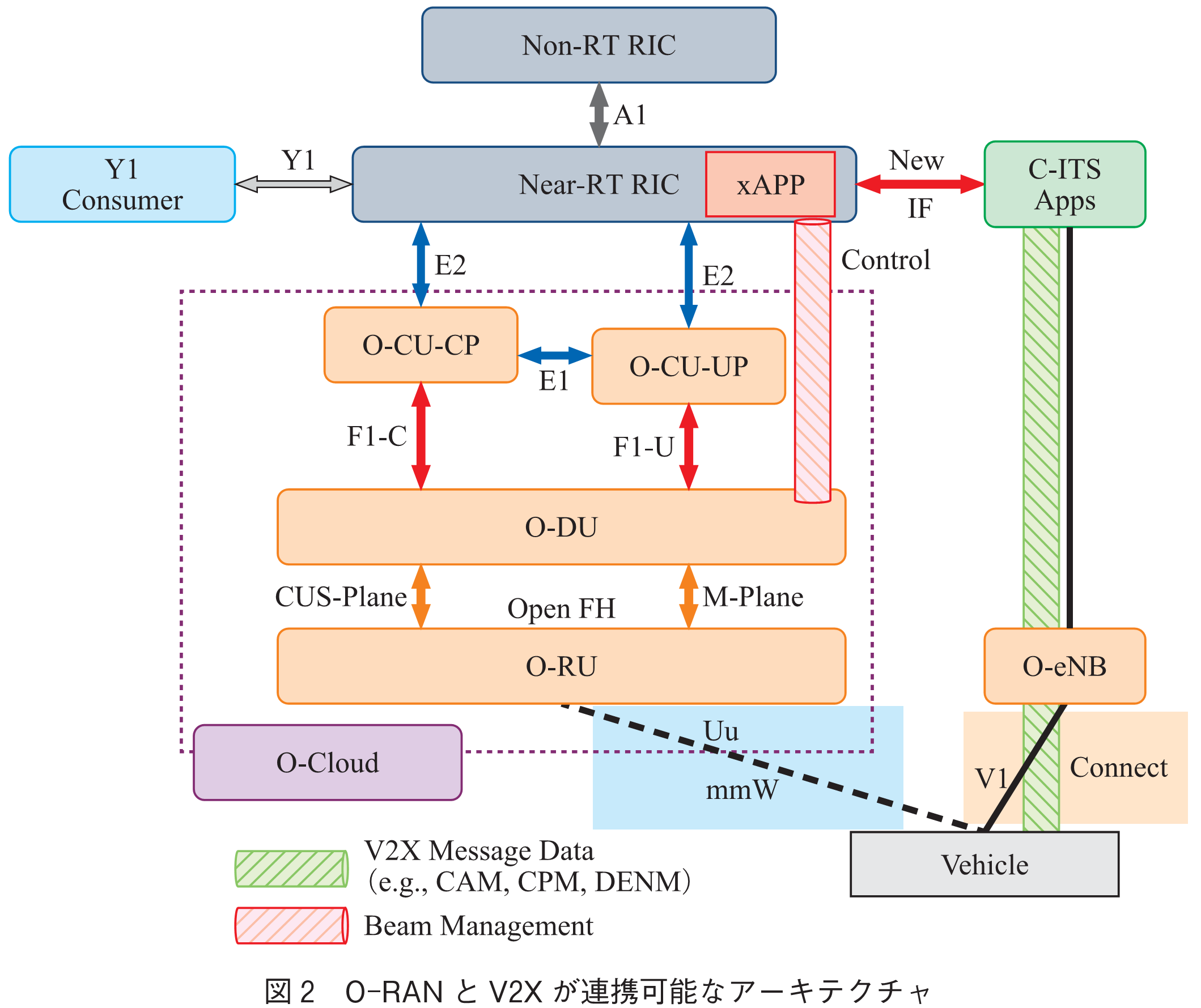
一方で,V2N経由で送信したCAMやCPMは図2に示すC-ITS Appの一例としてダイナミックマップ上に動的な情報が更新される.ダイナミックマップ上では,地図などの静的な情報が展開されており,その静的な情報上に動的な情報が重畳される.ここで,動的な情報をRAN(Radio Access Network)側で活用するためにはRANと連携可能なインタフェースが必要となる.現在標準化されているxAPPの外部機能との連携インタフェースとして,A1とY1がある.A1は主にオーケストレータとの連携を定義されており,Y1はRAN分析情報を内部及び/または外部機能に公開するインタフェースである.そのため,ダイナミックマップと連携可能なインタフェースをA1あるいはY1を想定している.そこで本稿では,ダイナミックマップにて収集されたCAMにおける車両の位置と速度情報をNear-RT RICのxAPPにA1あるいはY1インタフェース経由で通知し,Near-RT RICのxAPP側で車両の位置と速度情報に基づき,O-DU側のビームフォーミング制御を行い,よりシームレスなハンドオーバ制御を行うことができる.
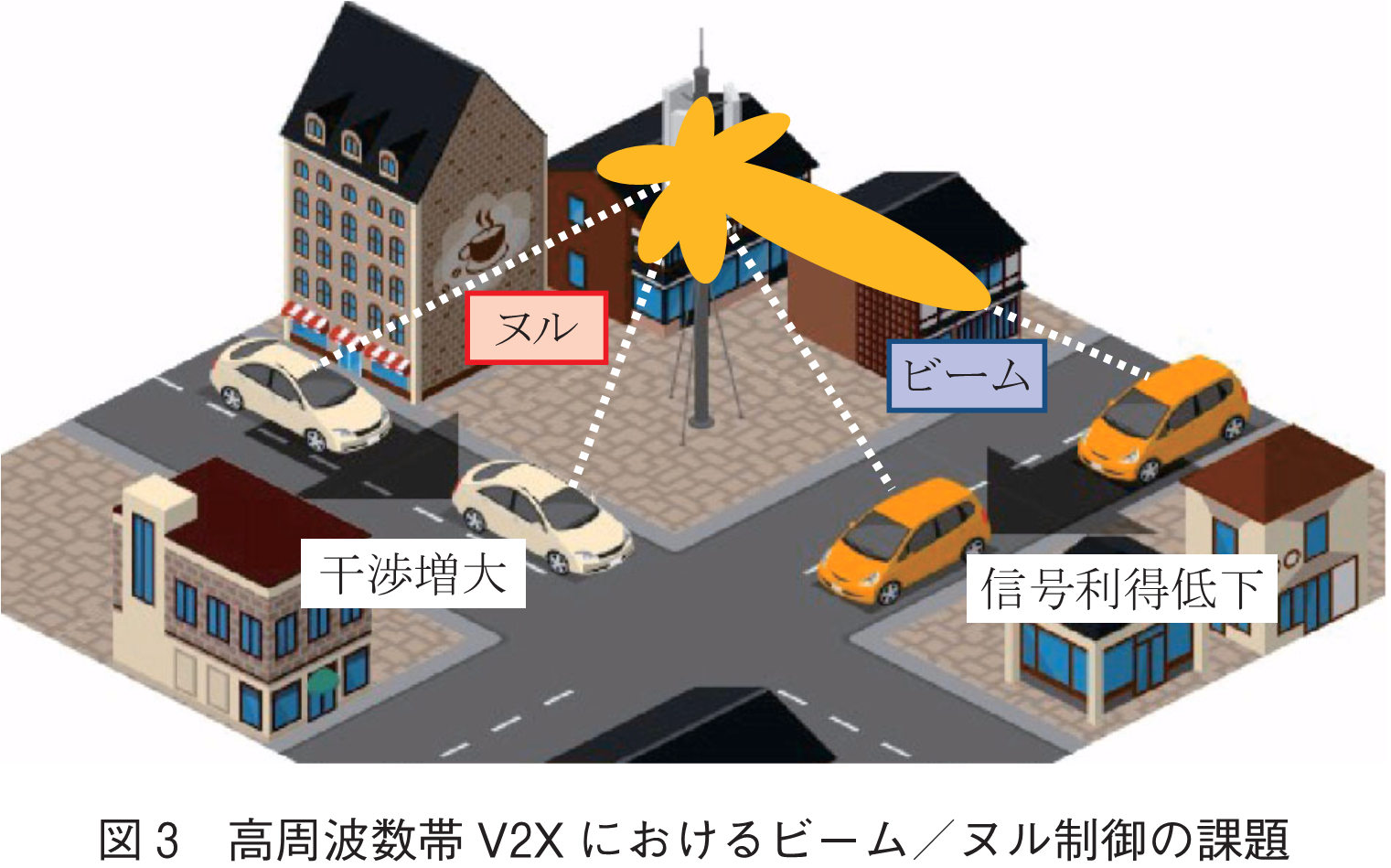
システム容量を増大するためには同一周波数・同一時間にて複数の信号ストリームを伝送するマルチユーザMIMOが有効である.しかし,本研究で対象とするV2Xでは通信対象が高速移動する車両である.下り回線マルチユーザMIMOでは,送信時に基地局と車両間の伝搬路情報(CSI: Channel State Information)を基に空間多重のためのプリコーディングウェイトを算出し送信信号に適用するが,その後車両の移動に伴い実際の伝搬路状態が当初のCSIと異なるものになってしまうことからユーザ間干渉が生じてしまう.言い換えると,図3に示すように,与干渉を低減したい車両に対して形成したヌルが外れてしまうことを意味する.V2X環境においては,車両へのビーム追従(3),(4)に加え,上記の課題に対処する必要がある.そこで,過去または将来のCSIを用いることでヌルの方角を広げる手法(ヌル空間拡張)とビーム追従を統合したロバストなマルチユーザMIMOのためのプリコーディングウェイト設計手法を提案している(6).提案方式の大きな特徴として,ヌル形成のウェイト(行列)とビームフォーミングのウェイト(ベクトル)はそれぞれ個別に算出して導出することができ,それらを乗算にて合成することで所望のウェイトを導出することができる.本方式においては,10msごとにビームフォーミングのウェイトのみを更新し,ヌル形成のウェイトに乗算すればよいため,演算負荷を低減できるというメリットがある.
提案方式の有効性を評価するために,シミュレーション環境を構築した.基地局とユーザの配置関係を含む評価条件を図4(a)に示す.28GHz帯を想定し,高速移動環境にある2ユーザ(車両)に対してダウンリンクのマルチユーザMIMOによる空間多重伝送を行うものとする.ここで,マルチユーザMIMO空間多重伝送のためのヌル形成ウェイト制御としてETSIのファシリティ層メッセージとして定義されている,車両の位置や速度情報を扱うCAMの取得間隔(100ms)の制約を考慮する.つまりヌル形成ウェイトは100ms間隔で更新される.一方,O-RANの機能であるNear-RT RICの仕様も踏まえ,ビーム追従機能として位置情報に基づき10ms間隔でビーム方向を更新できるものとする.本評価では車両の位置する方向に対して正確にビームを向けられるものとした.
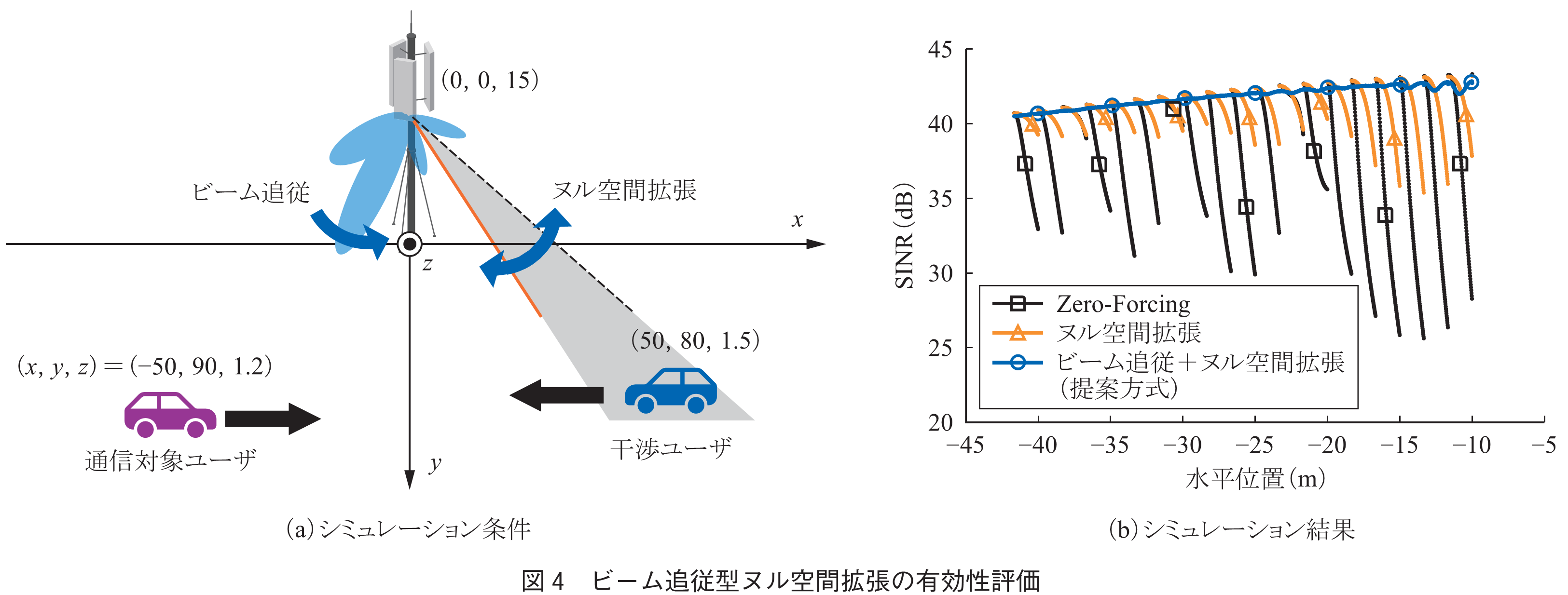
図4(b)に所望1ユーザに着目した信号対干渉雑音電力比(SINR: Signal-to-Interference-plus-Noise power Ratio)の遷移を示す.図から,提案方式が最も安定して高いSINRを維持できていることが分かる.ヌル空間拡張のみでは,ヌルは広域化されているものの車両の移動によりビームから外れてしまうために所望信号利得が低下し,これによりSINRが時間の経過とともに劣化する.提案方式は10msごとのビーム更新機能が追加されているため,車両の位置変化に追従し,高い所望信号利得が保たれる.
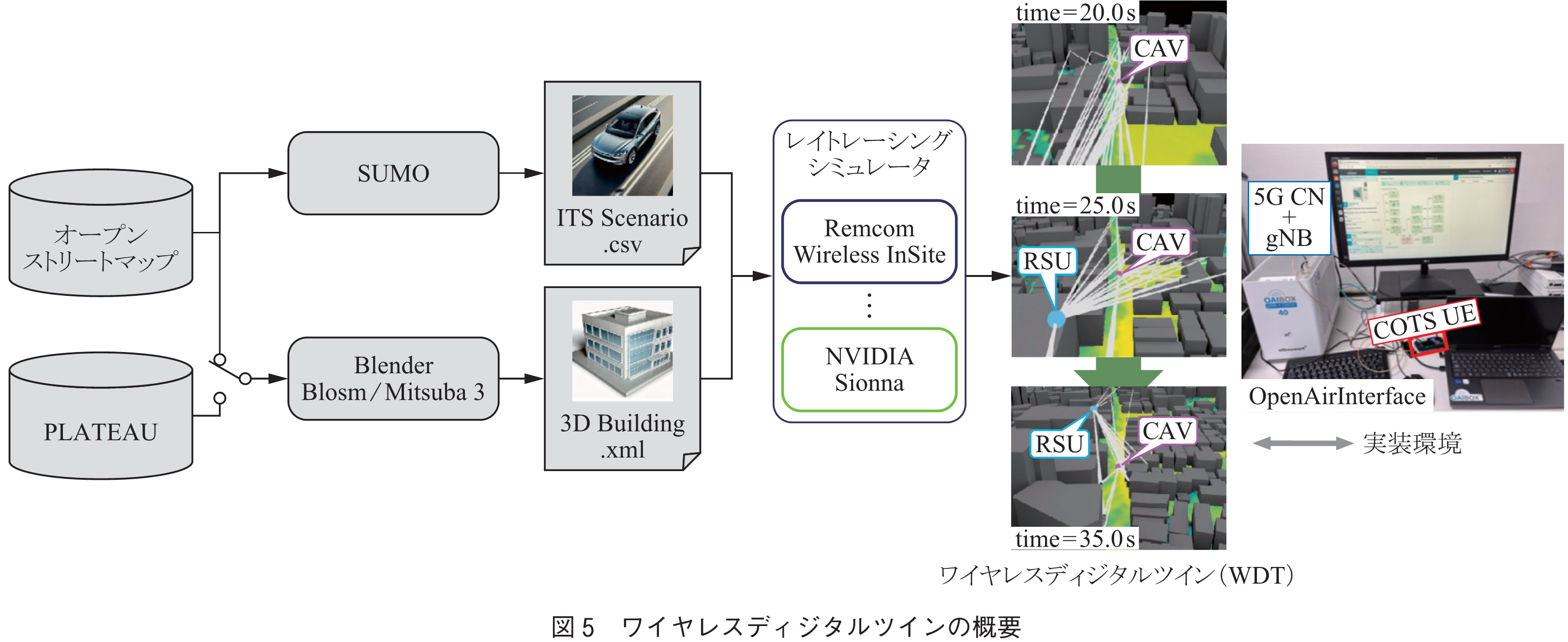
本章では,研究開発を進めているワイヤレスディジタルツインを説明する.交通システムにおいてITSと無線通信を統合した評価をする場合には,実環境の道路での建物による静的な遮蔽物だけでなく,通信対象の車両以外の走行車両による動的な遮蔽状態についても考慮する必要がある.これらを考慮すると,市中のシミュレーションソフトウェア製品としては,ITS単体または無線通信単体をシミュレーションするものはあるが,ITSと無線通信の双方をエミュレート可能なオープンなプラットホーム環境は筆者らが知る限りない.このため,ITSと無線通信の両方をエミュレートし,提案するO-RANによるV2X制御や多地点ビームフォーミング方式の有効性検証に必要なワイヤレスディジタルツイン(WDT: Wireless Digital Twin)を提案する.図5に提案するWDTのアーキテクチャを示す.図に示すとおり,建物等の三次元構造物地図データ及び道路データを入力し,三次元グラフィクス生成ソフトウェア(Blender)にて三次元仮想空間データ(都市空間モデル)を作成する.並行して,前記入力データを基に車両交通システムシミュレータ(SUMO)にて車両の種類(普通車両,トラックなど),速度などを定義した交通シナリオデータ(ITS scenario)を設定した上で作成した都市空間モデル上にて走行データを作成する.これらの作成データを基に,Wireless InSiteやオープンソースであればNVIDIA Sionna RT等の任意のレイトレーシング法による電波伝搬シミュレータにインプットする.得られた結果をディジタルツイン空間の都市空間モデルの上に,通信及び交通情報を同時に表示させることでモビリティネットワーク向けのディジタルツインを構築することができる.また,WDTとOpenAirInterfaceで構成された実機との連携を行うことについても取組みを進めている(9).構築したWDTを活用することで2.のアーキテクチャを適用し,動的に変化する環境作ることで遮蔽予測やハンドオーバ管理などへの活用と,3.にて説明した複数ユーザに対するビーム追従及び干渉制御などを実環境に近い環境で評価をすることが可能となる.
本稿では,RANとV2Xの相互連携を実現するために,O-RANのフレームワークを活用したV2X連携アーキテクチャを提案するとともに,車両の位置変化に追従し,高い通信品質を保つための多地点ビームフォーミングの検討を行った.更に,これらをより現実に近い環境で評価するためのWDT(Wireless Digital Twin)アーキテクチャを提案した.今後は,WDTを活用し,三次元環境における遮蔽予測やハンドオーバの最適化についても検討を進め,実機との連携を考慮して進めていく予定である.
謝辞 本研究開発は総務省FORWARD(受付番号JPMI240310001)の委託を受けたものです.また,本稿を作成するにあたりサポートして頂いた,東京大学情報理工学研究科創造情報学専攻 江崎浩教授,塚田学准教授,修士課程 鈴木健吾氏,東京理科大学工学研究科電気工学専攻修士課程 佐々木友基氏,小澤爽仁氏に深く感謝致します.
(1) J. Nakazato, K. Nakagawa, K. Itoh, R. Fontugne, M. Tsukada, and H. Esaki, “WebRTC over 5G: A study of remote collaboration QoS in mobile environment,” J. Netw. Syst. Manage., vol.32, no.1, ISSN: 1573-7705, 2023.
(2) Y. Asabe, E. Javanmardi, J. Nakazato, M. Tsukada, and H. Esaki, “Enhancing reliability in infrastructure-based collective perception: A dual-channel hybrid delivery approach with real-time monitoring,” IEEE Open Journal of Vehicular Technology, doi: 10.1109/OJVT. 2024.3443877, 2024.
(3) S. Ozawa, T. Ikuta, Y. Sasaki, R. Iwaki, J. Nakazato, M. Tsukada, H. So, and K. Maruta, “Location-aided fast beam tracking algorithm for millimeter-wave V2I,” IEICE Commun. Express, vol.13, no.5, pp.146-150, doi: 10.23919/comex. 2024XBL0001, May 2024.
(4) S. Ozawa, Y. Sasaki, J. Nakazato, M. Tsukada, and K. Maruta, “Toward O-RAN-based cell-free architecture: Cooperative O-RU/V2X mmwave beam tracking,” Proc. IEEE VTC-Spring 2024, 2024.
(5) K. Suzuki, J. Nakazato, Y. Sasaki, K. Maruta, M. Tsukada, and H. Esaki, “Toward B5G/6G connected autonomous vehicles: O-RAN-driven millimeter-wave beam management and handover management,” IEEE INFOCOM, The 2nd Workshop on Next-generation Open and Programmable Radio Access Networks (NG-OPERA), 2024.
(6) S. Ozawa, Y. Sasaki, J. Nakazato, and K. Maruta, “Broad-range null-steering incorporated with beam tracking for millimeter-wave V2X,” Proc. IEEE Consumer Communications & Networking Conference (CCNC 2025), Las Vegas, USA, Jan. 2025.
(7) O-RAN Working Group 4 (Open Fronthaul Interfaces WG), “O-ran. wg4. cus. 0-r003-v13.00,” Oct. 2023.
(8) O-RAN Working Group5: Open F1/W1/E1/X2/Xn Interfaces Working Group, “O-ran. wg5. c. 1-r003-v11.00,” Oct. 2023.
(9) T. Iye, M. Sakamoto, S. Takaya, E. Sato, Y. Susukida, Y. Nagaoka, K. Maruta, and J. Nakazato, “Open wireless digital twin: end-to-end 5G mobility emulation in O-RAN framework,” 2025.[Online]. https://arxiv.org/abs/2503.12177
(2025年2月3日受付 2025年2月27日最終受付)



オープンアクセス以外の記事を読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()