|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|

クラウドネットワークロボット研究専門委員会
サイバネティックアバタ
サイバネティックアバタ(Cybernetic Avatar,以下CA)(1), (2)とは,ナノスケールやマイクロスケールの体内モニタリング用エージェントから,多様なサービスを提供するロボットまで含み,実空間と仮想空間のアバタを統一するものである.CAは身体や脳,時間的,空間的制約から個人を解放し,豊かな生活や自由な働き方を可能にする新しいメディアで,ムーンショット目標1にて2020年から人間中心のCA開発(3)が進んでいる.
自律ロボットはAIやセンサ技術を駆使して,テレオペレータの介在なしに,自動的にタスクをこなし,人間の作業を代行するものである.これに対し,CAは自律で稼動する部分もあるが,テレオペレータが介在し,ユーザと相互に対話したりしながら,サービスを提供し,人間の能力の補完と拡張を主眼としている.つまり自律ロボットが,ロボット主体の技術領域であるのに対し,CAはテレオペレータとサービスユーザがCAを介して相互作用する人間主体の技術領域となっている.
CAにはソシオCAと体内CAがある.ソシオCAは,三次元CG(コンピュータグラフィックス)から構成されるバーチャルアバタや遠隔操作ロボットである.テレオペレータにより操作され,ユーザに種々のサービスを提供する.具体例が分身ロボットカフェDAWN  (東京)(4)である.ここでは障がい者がロボットを遠隔操作してユーザと対話し,飲み物を提供などして働く.障がい者や引きこもり者などに雇用機会を提供し,DE&I(Diversity, Equity and Inclusion)の実現と労働人口増加に貢献している.また長崎県北浦郡佐々町では5歳児健診にも活用されている(5).
(東京)(4)である.ここでは障がい者がロボットを遠隔操作してユーザと対話し,飲み物を提供などして働く.障がい者や引きこもり者などに雇用機会を提供し,DE&I(Diversity, Equity and Inclusion)の実現と労働人口増加に貢献している.また長崎県北浦郡佐々町では5歳児健診にも活用されている(5).
体内CAは,ミリスケールからナノスケールのエージェントで,生体内からサンプルを取得したり,生体内に医薬品を投与したり,生体内の健康状態をモニタリングする.例えば,カプセル型CAは,体内の温度やPhなどのモニタリング,サンプル収集,標的医薬品の投与を行える.体内CA同士で連携して,遠隔操作で協調して出血が少ない手術なども可能とする.
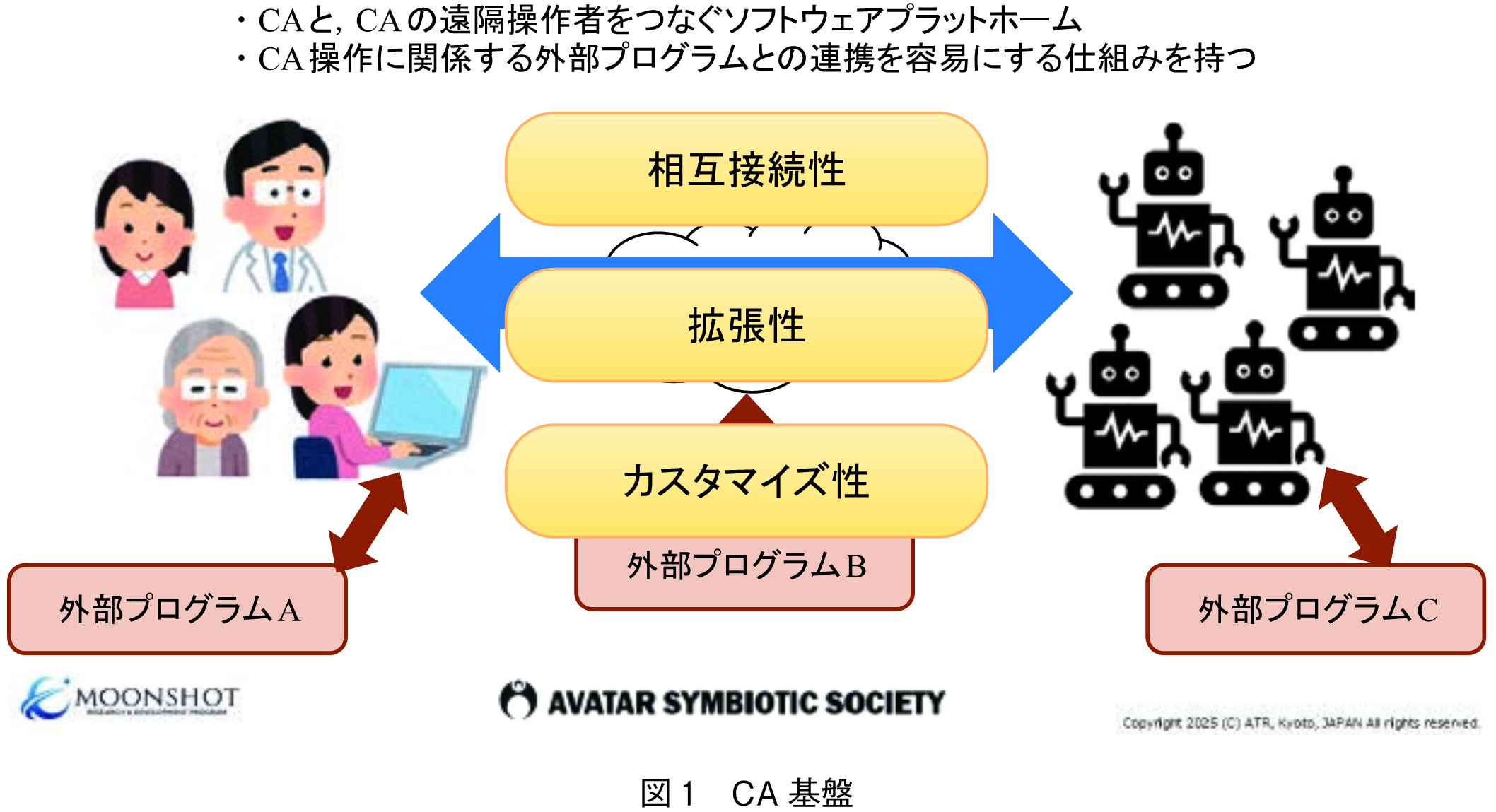
ソシオCAと体内CAはサイズ感がかなり異なるが,遠隔操作という点では共通した技術的課題があり,それを解決するCAとCA遠隔操作者をつなぐソフトウェアから成るCA基盤(図1)(2)の構築が進められている.CA基盤は後述する4種のCA遠隔操作を行えるようにする拡張性を有している.またCAサービス事業者が望むサービスを実現できるように種々の外部プログラムを融合するカスタマイズ性も有している.更にロボット開発用のROS(Robot Operating System)などとの接続も可能とする相互接続性も有している.
CA遠隔操作は,テレオペレータとCAが1対1,1対 ,
, 対1,
対1, 対
対 の四つの運用モードに分類できる.
の四つの運用モードに分類できる.
1対 は,一人の人間が
は,一人の人間が 体のCAを操作して,複数の場所で複数タスクを実行する.テレオペレータの主体性を維持し,ルーチンタスクを人工知能(AI)に任せる.例えば,AI強化の対話システムでは,複数の会話を同時に管理でき,テレオペレータの意図に沿った調整が必要なときに会話に参加する.分身ロボットカフェDAWN
体のCAを操作して,複数の場所で複数タスクを実行する.テレオペレータの主体性を維持し,ルーチンタスクを人工知能(AI)に任せる.例えば,AI強化の対話システムでは,複数の会話を同時に管理でき,テレオペレータの意図に沿った調整が必要なときに会話に参加する.分身ロボットカフェDAWN  でも既に1対
でも既に1対 運用モードは実践されている.
運用モードは実践されている.
 対1では,
対1では, 人のテレオペレータがスキルと専門知識を組み合わせて,1体のCAを操作し,複雑なタスクを実行するCAの操作が可能となる.例えば,一人が動きを操作し,もう一人がグリッパを操作してCAのアーム制御を行う協力制御システムが開発されている.人間と機械の相互作用のモードにおいて,同期メカニズムの開発と共通の主体感を確保することが重要である.
人のテレオペレータがスキルと専門知識を組み合わせて,1体のCAを操作し,複雑なタスクを実行するCAの操作が可能となる.例えば,一人が動きを操作し,もう一人がグリッパを操作してCAのアーム制御を行う協力制御システムが開発されている.人間と機械の相互作用のモードにおいて,同期メカニズムの開発と共通の主体感を確保することが重要である.
 対
対 は,これらを組み合わせたもので,例えば災害時など国内外から
は,これらを組み合わせたもので,例えば災害時など国内外から 人のテレオペレータが
人のテレオペレータが 体のCAを操作して,体内CAと通信して被災者を探索することも,将来的に可能となる.
体のCAを操作して,体内CAと通信して被災者を探索することも,将来的に可能となる.
国内外を問わず,遠隔から1対1,1対 ,
, 対1,
対1, 対
対 でCAを操作するには,異なるCAシステムやCAアプリケーション間で,相互運用性を確保するために標準化が必要である.標準化に関しては,ネットワークロボット関連で行われてきたOMG(Object Management Robot)での標準化が継続され,RoSO(ロボットサービスの機能要件を記述するためのオントロジ)1.0に,CAサービス機能の記述仕様が2025年8月に組み込まれる.これに加え通信基盤として3GPPなどでの標準化も進みつつある.
でCAを操作するには,異なるCAシステムやCAアプリケーション間で,相互運用性を確保するために標準化が必要である.標準化に関しては,ネットワークロボット関連で行われてきたOMG(Object Management Robot)での標準化が継続され,RoSO(ロボットサービスの機能要件を記述するためのオントロジ)1.0に,CAサービス機能の記述仕様が2025年8月に組み込まれる.これに加え通信基盤として3GPPなどでの標準化も進みつつある.
制御アルゴリズムやネットワーク最適化を通じて信頼性を向上させることは,遠隔操作における可変遅延やネットワークの不安定性といった不確実性を軽減することも重要である.これらの通信分野での標準化も必要となる.
強力な認証プロセスを通じて不正アクセスを防ぎ,ユーザのプライバシーを保障するために,堅ろうな安全性とセキュリティの実装が重要である.
AIと同様に,CAの社会実装には,様々な倫理的及び法的な問題がある.偽造やID盗難を防ぐために重要なのは身元確認である.説明責任も重要な問題である.AI支援を得た上での意思決定において,法的責任を定義せねばならない.AIがCAの操作に部分的に関与している場合,意図的行為と過失行為の従来の区別が曖昧になる.CAを社会に導入するためには,包括的な規制政策と認証プロセスを開発することが不可欠である.
CA本人を認証するCA適合性評価やCAシステム適合性評価に関してはJISでの規格化が進行している.
新しいメディアとしてのCAが受け入れられるか,社会受容性も重要である.そのため,CAを用いた実証実験やビジネス化が進められている.2024年現在で小売業,教育,オフィス業務,病院,空港,ホテルなど100件近い実証実験が行われている.中には多拠点をつないだ実証実験,UAEドバイのショップと日本をつないだ実証実験,グラングリーン大阪の中核機能施設「JAM BASE(ジャムベース)」などでの実証実験が含まれている.2025年の関西万博にて命の未来パビリオンでの実証実験もある.コンビニではバーチャルアバタと生成AIを用いた1対 の接客サービスが既に稼動している.
の接客サービスが既に稼動している.
CAでは遠隔操作者-CA-サービスユーザ間のインタラクションを重視している.CAが細胞サイズになったら相互作用などないのではないかと思われるかもしれない.がNHK人体Ⅲ第1回(2025年4月)の放送では,細胞内で二足歩行するモータたん白質キネシンが紹介されていた.キネシンの運動は,細胞内物質輸送,細胞分裂,ニューロンの軸索輸送など,細胞の様々な機能に関与している.キネシンに倣えば,将来的には,ソシオCAと体内CAがインタラクションして,健康維持のための様々なインタラクションが行われることも夢ではないと期待している.
(1) N. Hagita, R. Kanai, H. Ishiguro, K. Minamizawa, F. Arai, F. Shimpo, T. Matsumura, and Y. Yamanishi, Cybernetic avatars: Teleoperation technologies from in-body monitoring to social interaction, Science Robotics, vol.9, eadg1842, 2024.
(2) H. Ishiguro, F. Ueno, and E. Tachibana, Cybernetic Avatar, Springer Singapore, 2024.
(3) ムーンショット目標1,JST.
https://www.jst.go.jp/moonshot/program/goal1/index.html
(4) アバターロボットカフェDAWN  .
.
https://www.youtube.com/watch?v=e5qZNkiMYOg
(5) 長崎県北松浦郡佐々町における5歳児健診でのロボット活用事例.
https://www.youtube.com/watch?v=OnJgrGXX9oc
(2025年4月5日受付)
オープンアクセス以外の記事を読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()