|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
自動車分野での通信の研究と言うと多くの読者にとっては不思議に感じるかもしれないが,ここ10年くらいの間に,CASE(Connected, Autonomous, Shared, Electric)とか,MaaS(Mobility as a Service)とか,自動車業界は大きく舵取りを変えようとしている.これまで,通信技術は自動車にとっては脇役のような存在でしかなかったが,次世代の車にとって通信によって「つながる」機能は必要不可欠なものとして認識されるようになってきた.
昨今では,テレマティクスシステム(用語)など車で通信を利用することも一般的になってきたものの,車車間通信機能を搭載した車はまだまだ少なく,普及の過渡期にあるのが現状である.
以下では,弊社がこれまでに取り組んできた通信に関連した研究事例を紹介する.
ARIB STD-T109として知られる700MHz帯高度道路交通システムは我が国が各国に先駆けて実用化した車車間・路車間通信技術である.基本的な仕様は無線LANとして知られるIEEE 802.11と同じCSMA/CA方式が採用されている.
700MHz帯の車車間通信は,車の接近などの情報提供を当初の目的としており,「車両が5m移動するのに一度くらいの頻度で位置が把握できること」というニーズを基に各種のパラメータが設定された.車両の移動速度や,帯域幅などの制約を勘案して,100msに一度,位置や速度などの100Byte程度の情報を同報通信で周辺の車両に向けて送信する仕様となっている.
当初,我々の研究グループは通信の信頼性の確保が最重要であると考え,自律分散形で動作する時分割多元接続方式(D-TDMA方式)を提案した(1).図1に我々が提案した方式の試作機の外観,主要な緒元を示す.

従来方式であるCSMA方式は,互いに電波が届かない送信端末同士が同じタイミングで送信してしまうことで受信時にパケットが衝突してしまう隠れ端末問題と呼ばれる問題がよく知られたが,我々の提案はこれを回避できる方法として,非常に有効であることを実証実験で示すことができた(2)(図2).
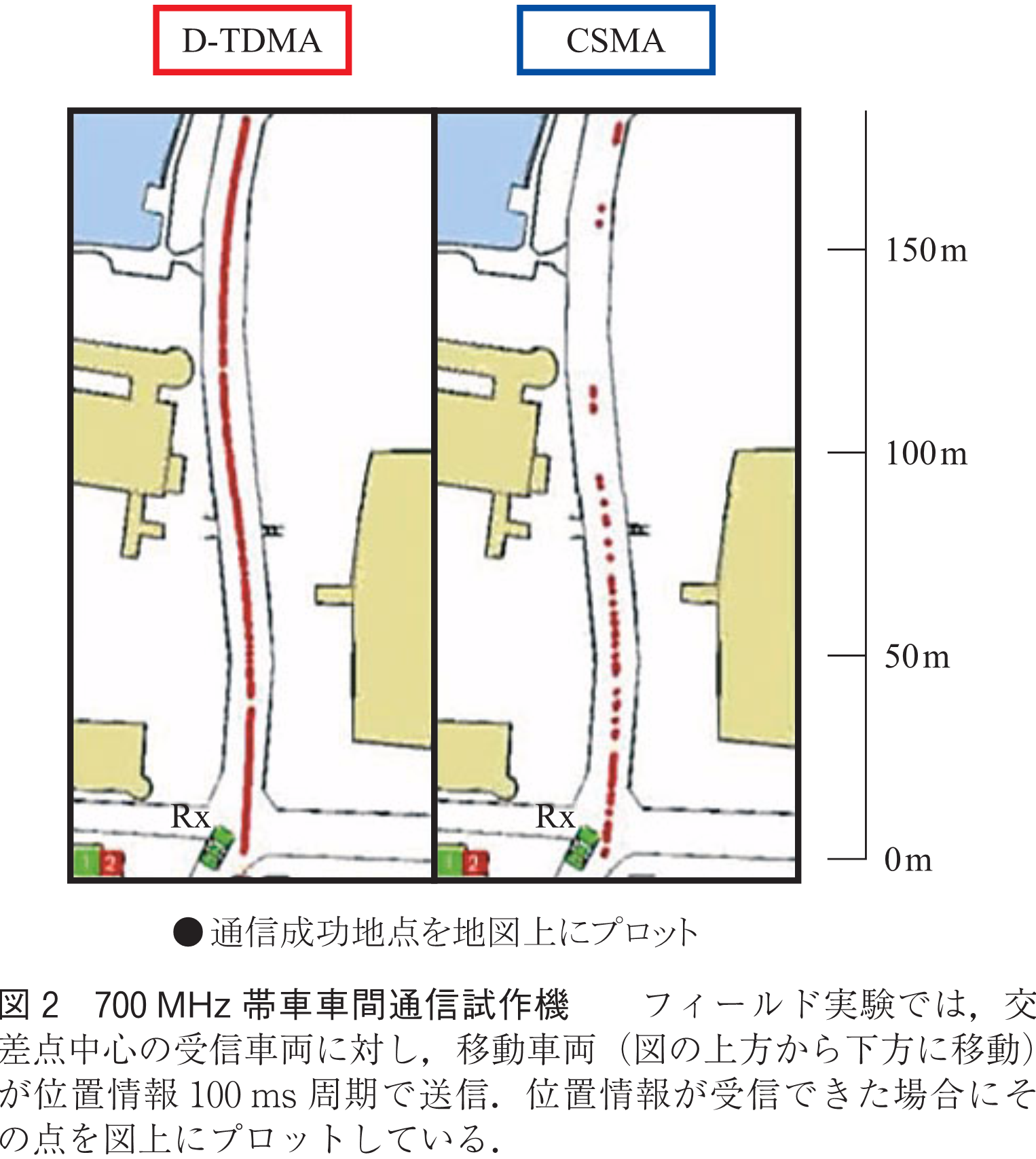
最終的には,技術の実績や,開発のコスト,国際協調など様々な観点からCSMA方式が世界の標準方式として採用されることとなったが,干渉の問題を世の中に提起しその解決策を示すことができたという点では,一定の成果を上げることができたと考えている.
車での通信利用が期待されるアプリケーションとして,期待が高いものの一つとして自動運転がある.各社がこれまで開発を行ってきた自動運転は自律型の自動運転と呼ばれるものであり,各車両に搭載されたセンサの情報を基にして加減速,発進・停止,曲がるなどの判断を行うタイプの自動運転である.制御のための判断が車載センサのみによって決定されるため,見通しの悪い交差点や,高速道路の分合流など車載センサのみで周辺の環境を完全に把握できないようなシーンでは,通信の利用が期待されている.
通信を自動運転などの制御系のアプリケーションで利用するためにはその応答性が重要となるが,第5世代の移動体通信サービス(5G)による通信の低遅延化や,エッジコンピューティング(MEC: Mobile Edge Computing)が普及することにより,応答性は劇的に向上することが期待される.
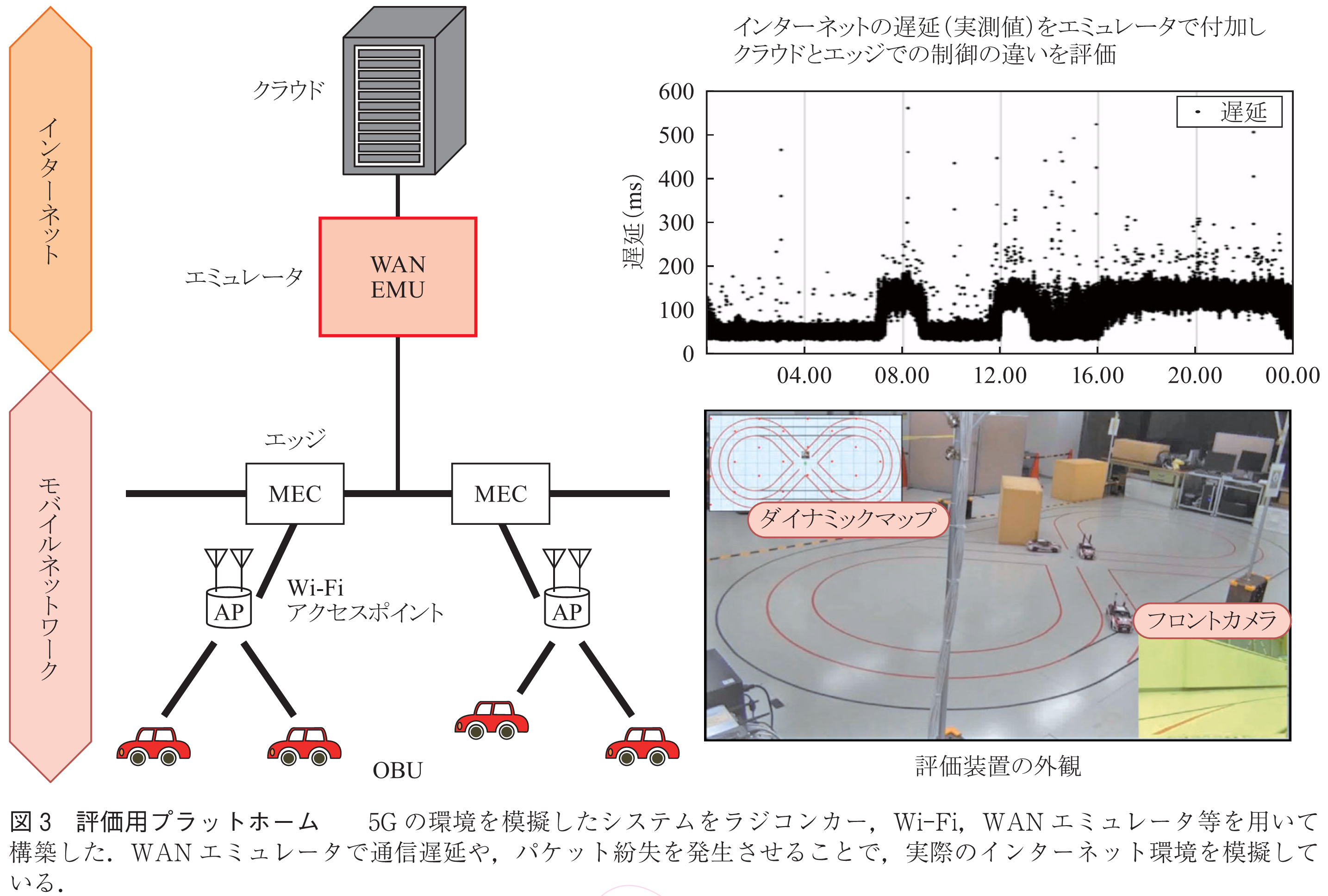
我々は,交差点や分合流などの車が交錯するシーンでの自動運転によるスムーズな走行の実現を目指して遠隔型の自動運転を提案している.実際に遠隔での自動運転を行う場合には,データ収集や,制御コマンドの伝達に関する遅延が懸念されるが,それらの影響を評価するため,1/10スケールのラジコンカーとWi-Fiを用いて図3に示すような評価環境を構築し評価を行っている.Wi-Fiのアクセスポイントに直結する形でMECサーバを配置し,WANエミュレータを経由してクラウドサーバに見立てたPCを配置することで実際の環境を模擬している.WANエミュレータにおいて実際に実環境で計測した通信遅延やパケット紛失を意図的に付加することで,制御への影響を評価している.
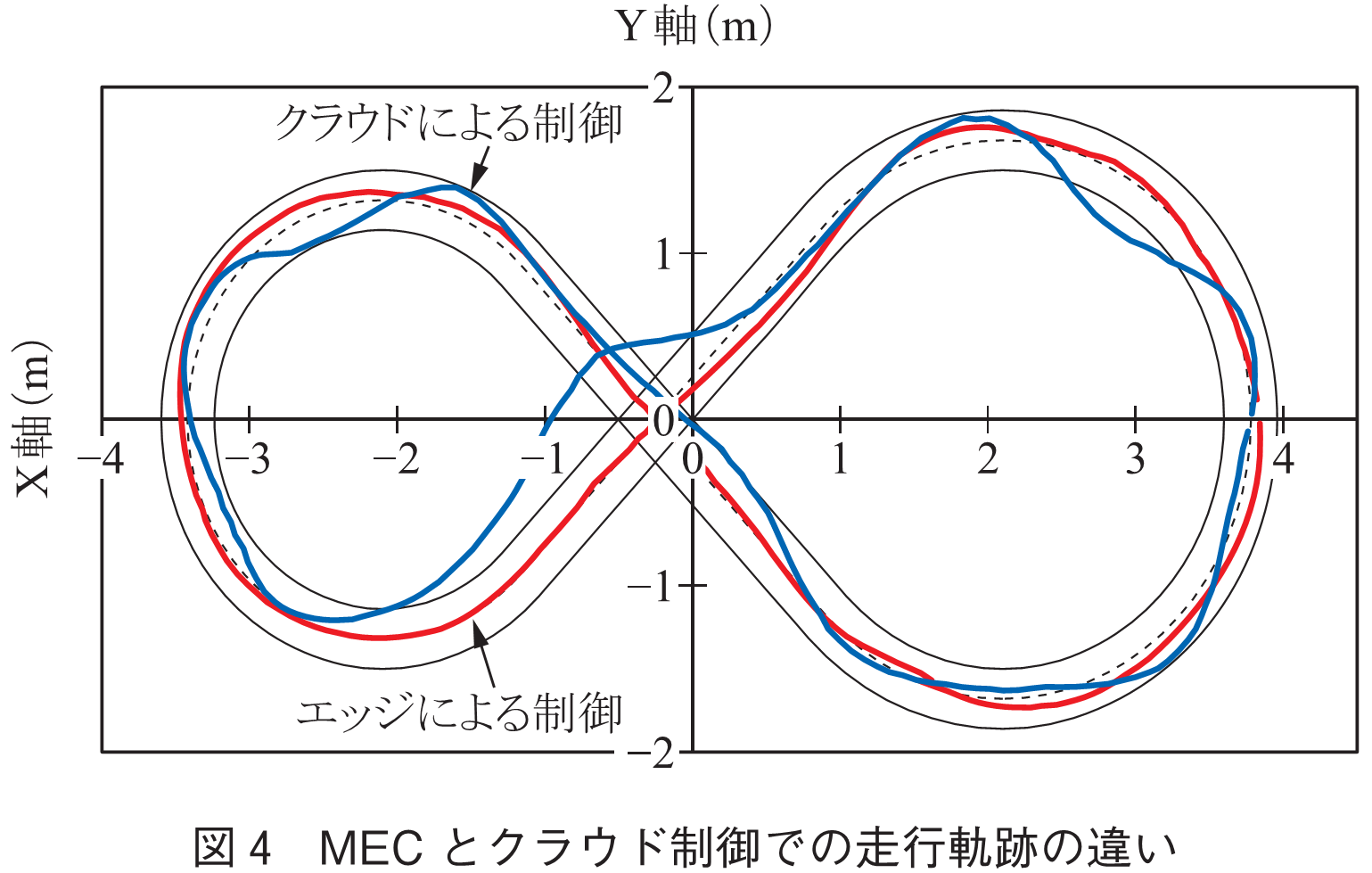
ネットワークで実測したクラウドまでの遅延をWANエミュレータで付加して,MECで遠隔制御を行った場合と,クラウドで制御を行った場合の走行軌跡の違いを評価した結果を図4に示す.無線部のみの遅延しか存在しないMECに対して,インターネットでの遅延が付加されるクラウドサーバでは大きく走行軌跡が乱れることが確認できた(3).
通信などの遅延が軽減されれば,センシングなどの応用も大きく広がる.位置情報に加えて,複数車両のセンサの情報を車外のサーバに集約し,サーバで高度なセンシング処理を行うことで,センシングそのものの性能を大幅に向上できる可能性がある.
我々は複数の車両からのセンシング情報をサーバ上に集約しセンシングする手法を協調センシングと呼び,検討を行っている.協調センシングの効果を検証するため,図5に示すような平たんなアスファルト舗装路面上に3台の車と2名の歩行者を配置し評価を行った.各車両には単眼カメラが搭載されており,画像処理によって検出された歩行者の情報と各車両の位置がサーバに送信される.サーバでは3台の車からの検出結果を統合することで,歩行者の追跡・行動予測を行うとともに,複数地点での検出結果を基に歩行者のより正確な位置を算出する.図5のA車,及び,B車は半径10mの円状のコースを時速5km/hで移動し,C車は静止して歩行者を検出している.
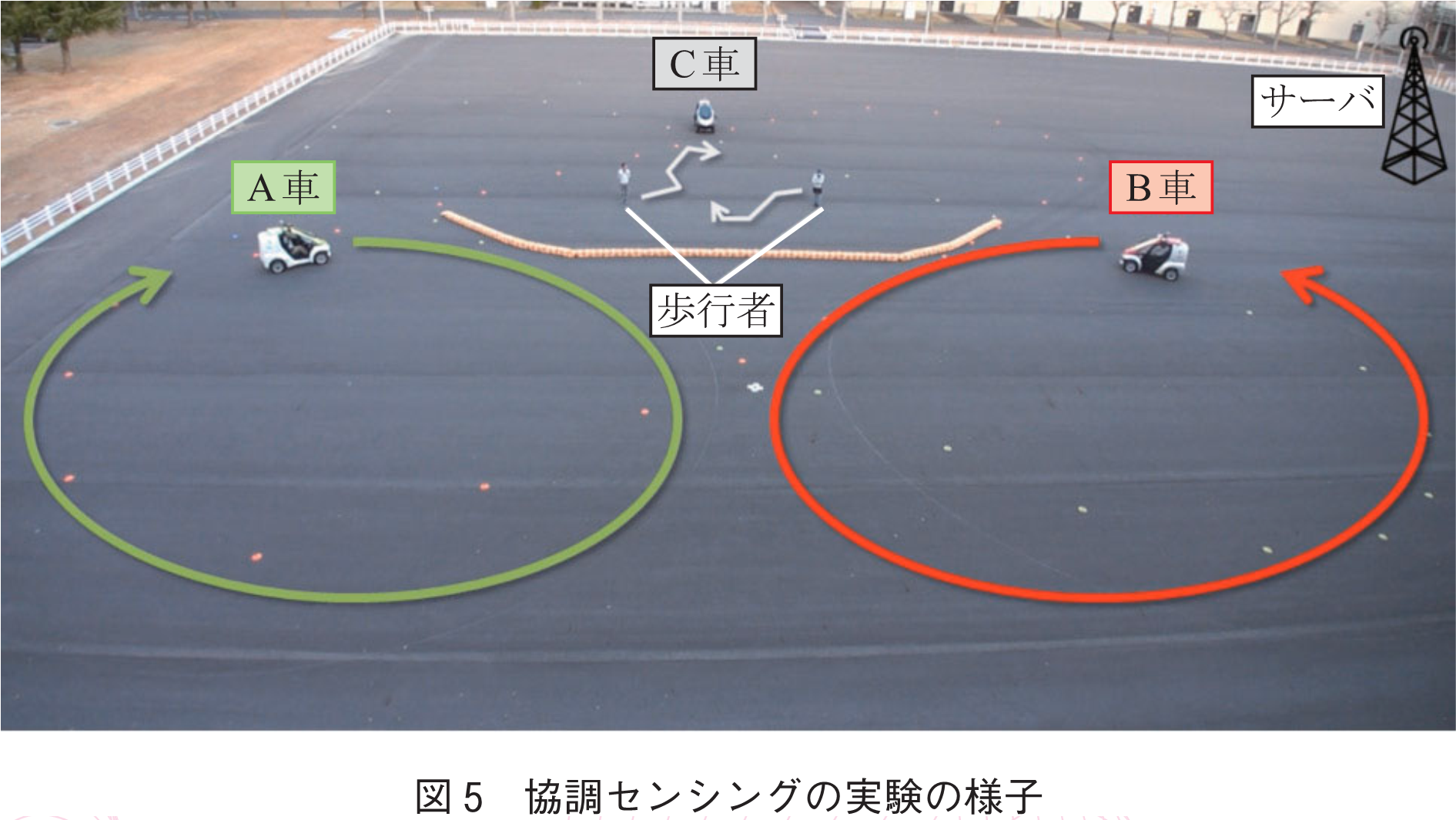
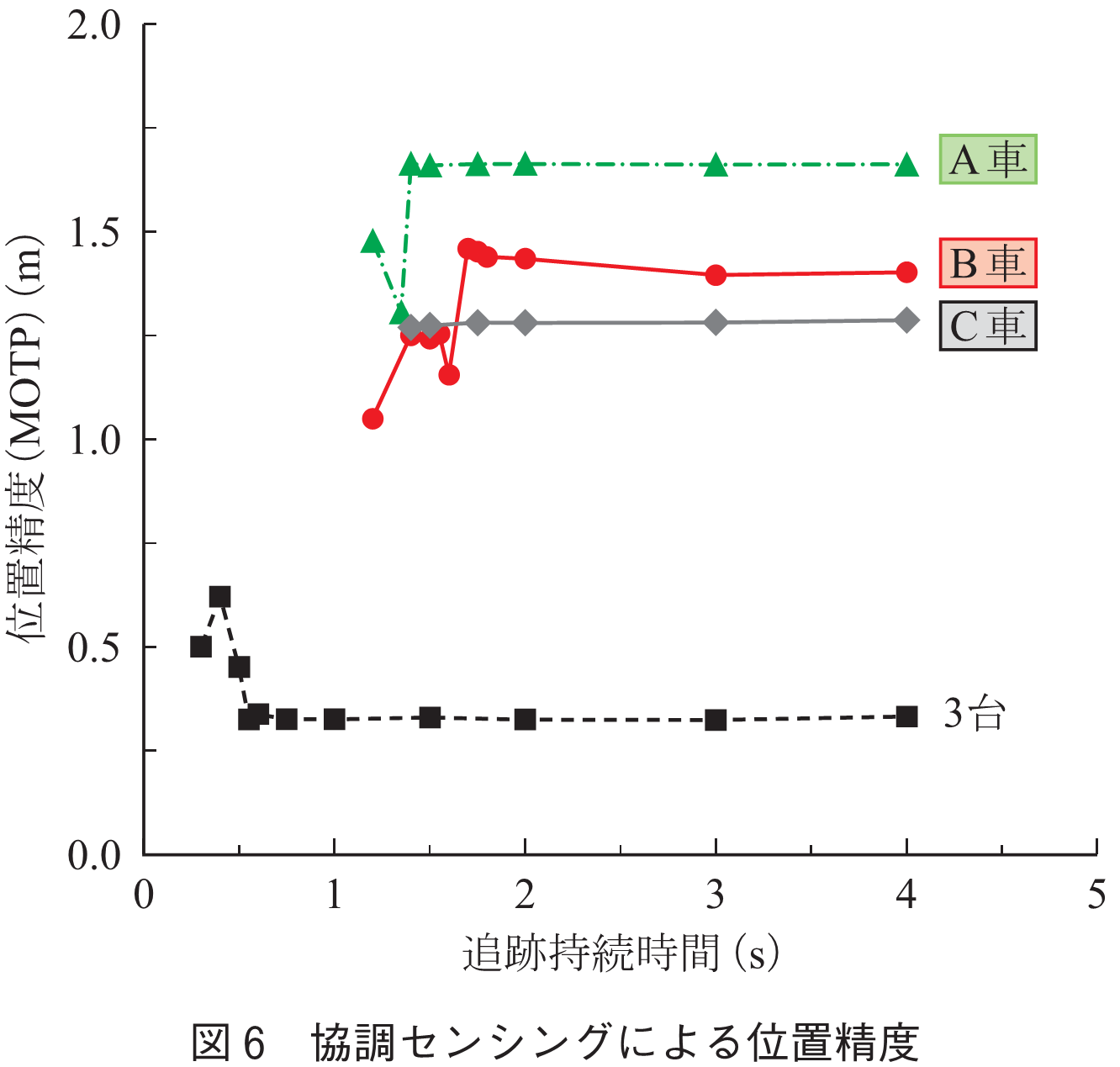
図6に評価結果を示す.図6の横軸はサーバでの歩行者追跡が始まってからの継続時間を,縦軸では多物体追跡の分野での精度指標としてよく用いられているMOTP(Multiple Object Tracking Precision)を示している.各車単独では,単眼カメラを用いているため奥行方向の距離精度が得られずMOTPが1mを超えているが,3台の車両からの情報を統合することで位置精度の指標であるMOTPは約30㎝程度まで向上することが確認できた(4).
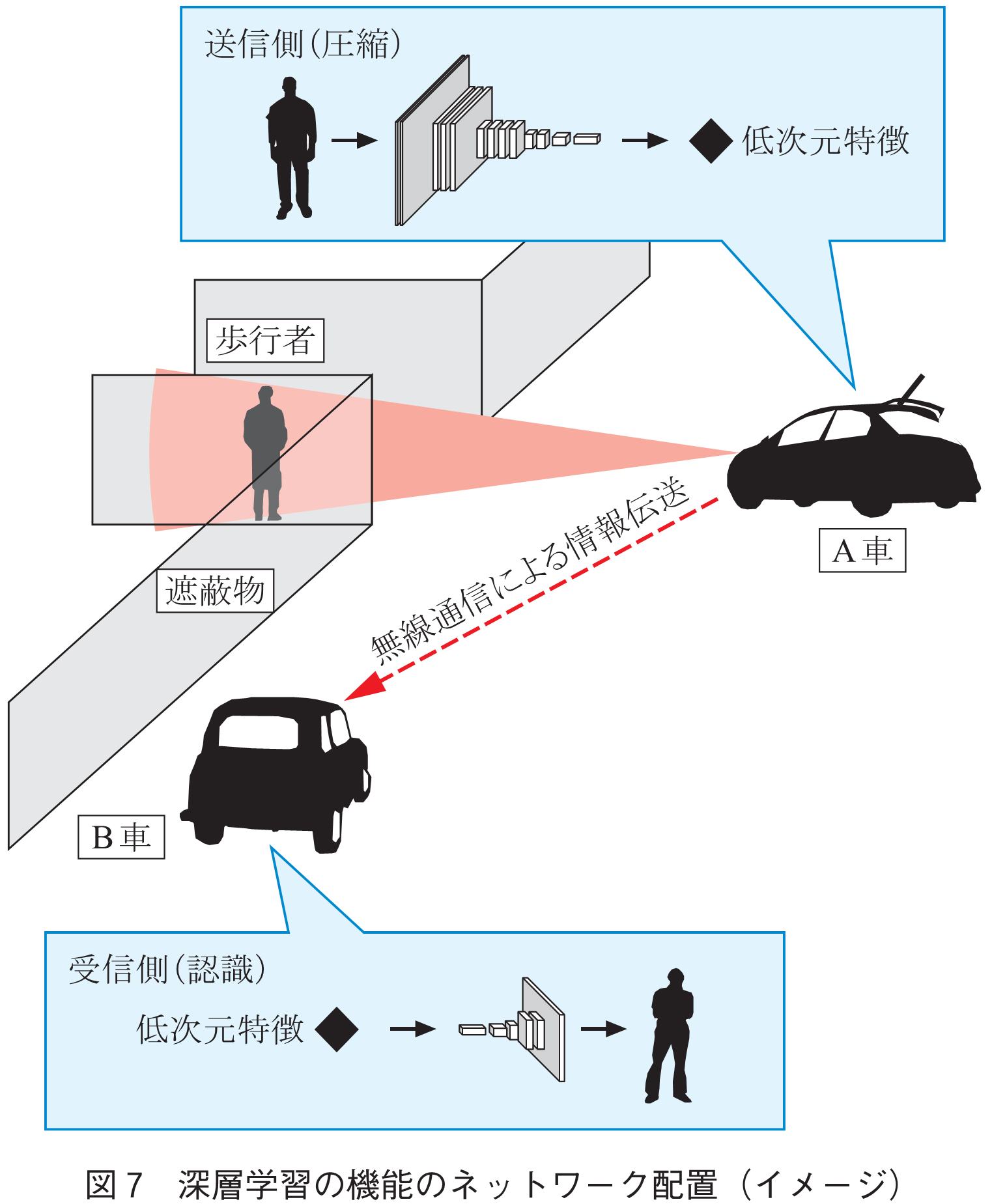
センシングの分野では,近年,深層学習を用いた手法が大きな成果を上げているが,我々は深層学習と通信との関係についても検討を行っている.深層学習では,ボトルネック層と呼ばれる層が存在し,その出力は情報が圧縮されて低次元な情報となることが知られている.これまでの情報圧縮では,情報源の持つテクスチャを小さい情報量で表現することを目的としてきたが,深層学習では情報の持つ特徴を圧縮していると捉えることができる.
このことを活用して,図7に示すようにボトルネック層までの処理の機能を送信側に持たせ,それ以降の処理を受信側で行うように機能配置を行うことで,通信負荷の少ないセンシングが可能となると考えている.大濱らの報告(5)では,CVAE(Conditional Variational Autoencoder)にあらかじめ向きの分かっている歩行者の画像を学習させ,ボトルネック層の低次元化された情報と,向きの情報を受信側に送ることで,受信側でのHMIで表示するための歩行者画像を生成する方法を提案している.
自動車の研究における通信技術との関わりについて,弊社における研究事例を例に紹介した.車の技術と通信技術はこれまで別々のものとして研究開発が行われてきたが,今後,車においても積極的に通信技術を利用していくことが期待されている.
車両単独で動作するシステムから,通信を活用することで車両相互が関連するシステムへと移行し,いかにして付加価値を生み出していくかが,車に関わる通信技術者にとって重要になってくるであろう.
謝辞 「2.700MHz帯高度道路交通システム」の内容は総務省委託研究「車車間通信の実現に向けた周波数高度利用技術の研究開発」プロジェクトの成果です.「3.自動運転での通信利用」の成果の一部は,東京大学中尾研究室との共同研究の成果です.執筆にあたり,データ等を提供して頂いた諸氏に感謝致します.
(1) 牧戸知史,鈴木徳祥,原田知育,村松潤哉,“リアルタイム車車間通信のための自律分散型TDMAプロトコル,”情処学論,vol.48, no.7, pp.2257-2266, July 2007.
(2) 牧戸知史,林 宏明,今井純志,原田知育,伊藤健二,田所幸浩,田中宏哉,鈴木徳祥,寺本英二,“次世代車車間通信のための高信頼MACプロトコル―高負荷模擬環境におけるフィールド評価―,”信学技報,RCS2009-272, pp.89-94, March 2010.
(3) 佐々木健吾,牧戸知史,中尾彰宏,“協調運転実現のための多層エッジサーバによる車両制御システム―インターネット遅延計測と計測結果を用いた車両制御評価―,”信学技報,NS2017-234, pp.375-380, March 2018.
(4) 中村亮裕,田口 峻,大濱吉紘,荒木円博,後藤邦博,“ローカルダイナミックマップ生成のための複数カメラを用いたリアルタイム多物体追跡システム,”FIT2018,no.M-001, Sept. 2018.
(5) 大濱吉紘,小島真一,後藤邦博,“Local Dynamic Mapの利用を想定した車載での壁透視表示向け歩行者画像生成法,”FIT2018,no.M-002, Sept. 2018.
(2019年7月10日受付 2019年7月30日最終受付)

■ 用 語 解 説
オープンアクセス以外の記事を読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()