|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
極限環境の計測を支える回路とシステム技術
小特集 2.
ガラス球構成フリーフォール型
水中無人探査機を用いた海洋環境計測
Ocean Environmental Measurement of Deep Sea Using a Glass Sphere for Free-fall Exploration System
Abstract
海洋環境計測において,低コストで簡便な運用が期待されているガラス球を用いたフリーフォール型の海中無人探査機型観測機について紹介する.筆者の一人が関わった江戸っ子1号プロジェクトに関連し,ガラス球内部に市販センサを設置した8,000m以上での超深海の海洋観測について述べる.更に,海洋の大きな問題となっているマイクロプラスチックの観測について,透明なガラス球の特徴を生かした光学的計測手法を紹介し,更に,MEMS技術を取り入れた取組みについて紹介する.
キーワード:海洋観測,マイクロプラスチック,ガラス球,フリーフォール型
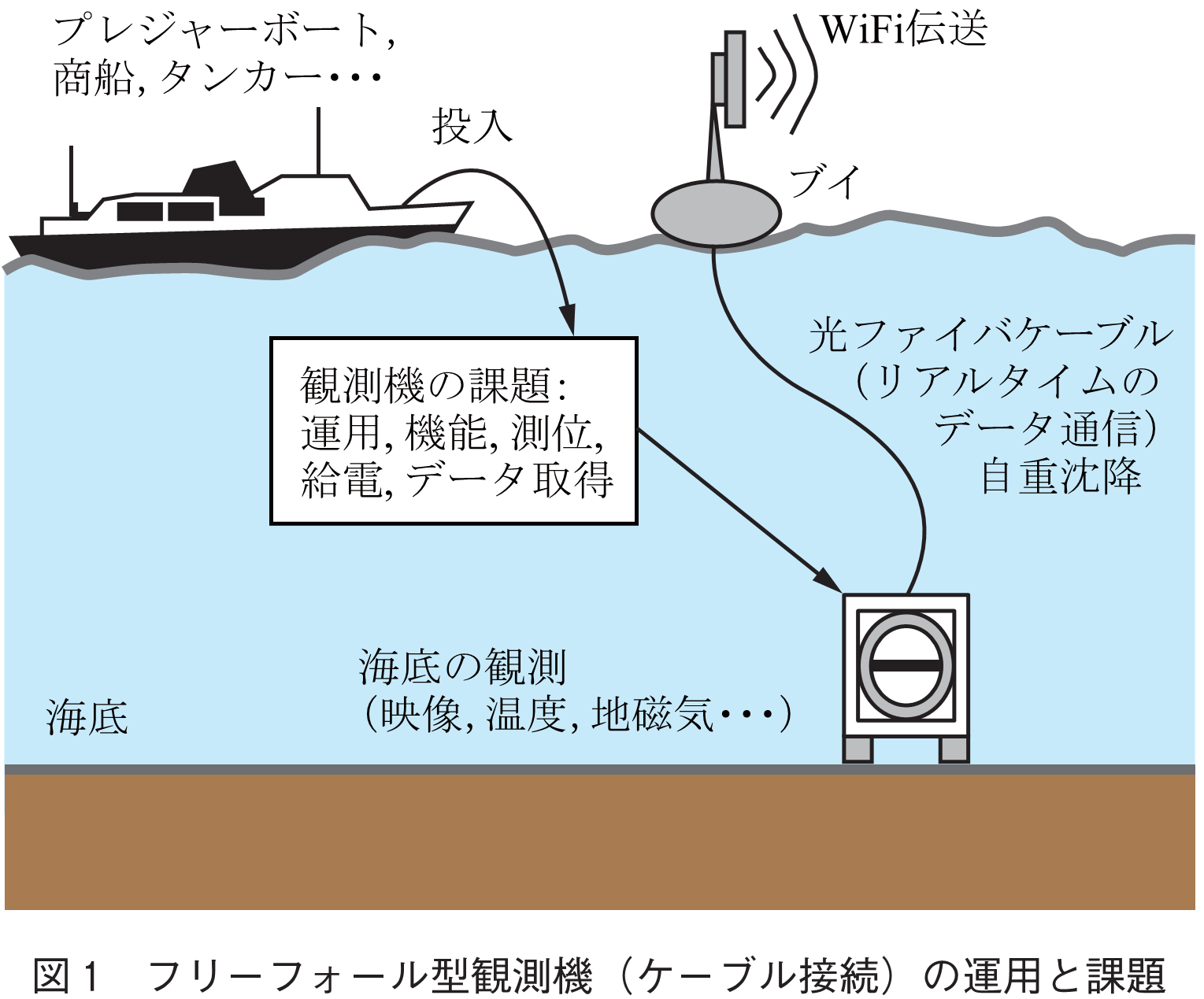
日本が有する世界第6位の排他的経済水域の確保,更なる国土周辺の海洋の利用,開発が求められている.そのためには,沿岸の海中,海底の網羅的な調査が必要である.これを実現するためには,海洋に深く関わっている研究所以外の団体・個人が,専用の調査船及び高額な機器を用いることなく調査に参加可能な環境を構築する必要がある.また,海洋調査機器の更なる高機能化をユーザが実施し,ユーザが取得した観測データの収集を容易にできるような環境にすることで,沿岸の網羅的調査の費用,時間の大幅な削減が期待できる.海洋調査では,ROV(Remotely Operated Vehicle),AUV(Autonomous Underwater Vehicle)が利用されているが,機器の開発に費用がかかることと運用も大型船舶を必要とするため,限られた台数と限られた研究機関での運用に限られていた.また,海底での定点観測にはガラス球に封入された観測機が地震計測などに利用されている.J-CADで代表される小形漂流ブイなども開発が進められている.そのほかに全球の水温,塩分濃度を即時的に取得するためのARGO計画と呼ばれる地球規模の研究計画が進められており,日本近海でも観測装置(ARGOフロート)が投入されている.ARGOフロートは,海底観測を目的としておらず,映像データは取得できない.また,海上に浮上したときに観測位置の測位が可能であるが海中ではGNSS(GPSなどの測位航法衛星システム)が利用できないため,測位することはできない.また,海底観測用のガラス球などの位置は海上からLBL(Long Base Line),SSBL(Super Shot Base Line)などの音響計測により測位可能であるが,同じく運用は限られた研究機関となり,海中の観測機内にも測位のための音響機器が必要となることから,網羅的観測には費用と時間がかかることになる.そのため,図1に示すような運用が容易で海底での測位を簡便に実現するリアルタイム測定可能なシステムの開発が必須である.
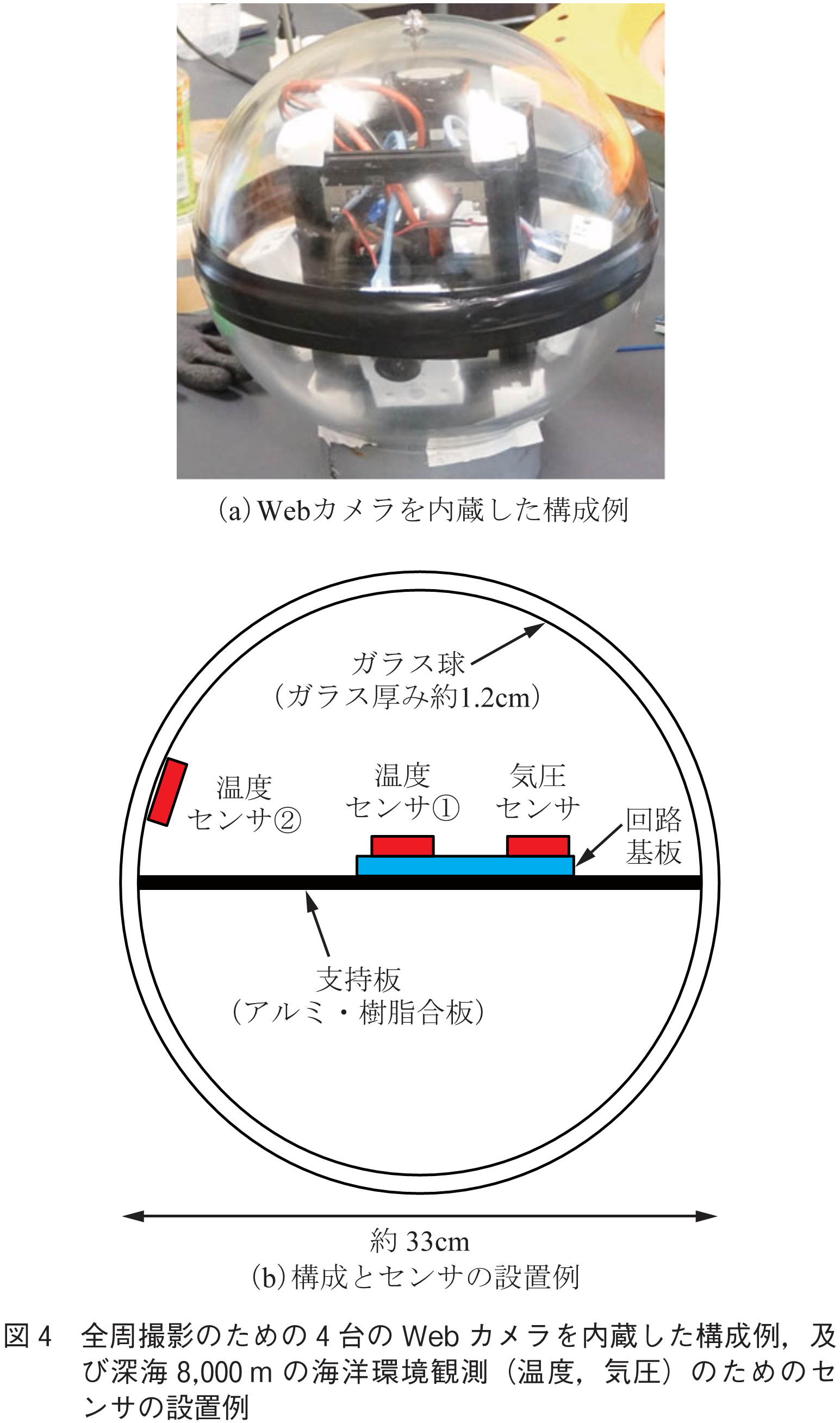
このような要求に対して下町の中小企業が中心となって深海探査機を製作しようという江戸っ子1号開発プロジェクトが立ち上げられた(1)~(3).中小企業の連合体に(独)海洋研究開発機構,芝浦工業大学,東京海洋大学が技術支援を行い,東京東信用金庫が事務局業務を行いながら進められた.プロジェクトでは,橋本らが開発したシステムを参考に低コストで製作・運用可能な深海探査機の製作を目的に開発が進められた.橋本らの開発したシステムはガラス球内に封入されるカメラにフィルムを用いたモータドライブ付きのスチルカメラを使用した(4),(5).これに対して,ビデオカメラの小形・高機能化に加えて,充電池,センサ技術の急速な進歩により「江戸っ子1号」ではMEMS技術により実現されたセンサ類を制御基板上に搭載することが可能となっている.プロジェクトでは,2013年11月に実施された4,000m並びに7,800m海域での実海域試験(6)において,ガラス球内から3Dハイビジョン映像の取得に成功している.併せてガラス球の外部に設置することなく内部に設置された温度センサ,気圧センサを通して外部の環境計測の可能性があることが確認された.これによりガラス球の加工が不要となり,深海の環境計測の低コスト化,簡素化が期待できる(7).
江戸っ子1号は図2に示すガラス球(岡本硝子株式会社社製)に機材を設置することで深海8,000mの高圧に耐えられる観測機を実現している.江戸っ子1号では市販のビデオカメラ(HDR-TD20V,(株)ソニー製)を内蔵した撮影球,LEDライトを内蔵した照明球,母船と通信するためのトランスポンダ(海洋電子株式会社製)を内蔵したトランスポンダ球で構成されていた.また,海面浮上後に自身の位置情報を母船に通知するためのGPSと衛星通信機器をそれぞれ内蔵した通信球がロープによりつながれた4球構成となっていた.躯体には鉄製のおもりがくくり付けられており,母船から海中に投下されると自重により沈降する.躯体が海底に着地すると照明球及び撮影球の電源がオンになりあらかじめ決められた時間スケジュールで外部環境の撮影が行われる.おもりの切り離しは母船から躯体のトランスポンダへの音波による指令で行われ,以降は躯体の浮力のみにより浮上する.
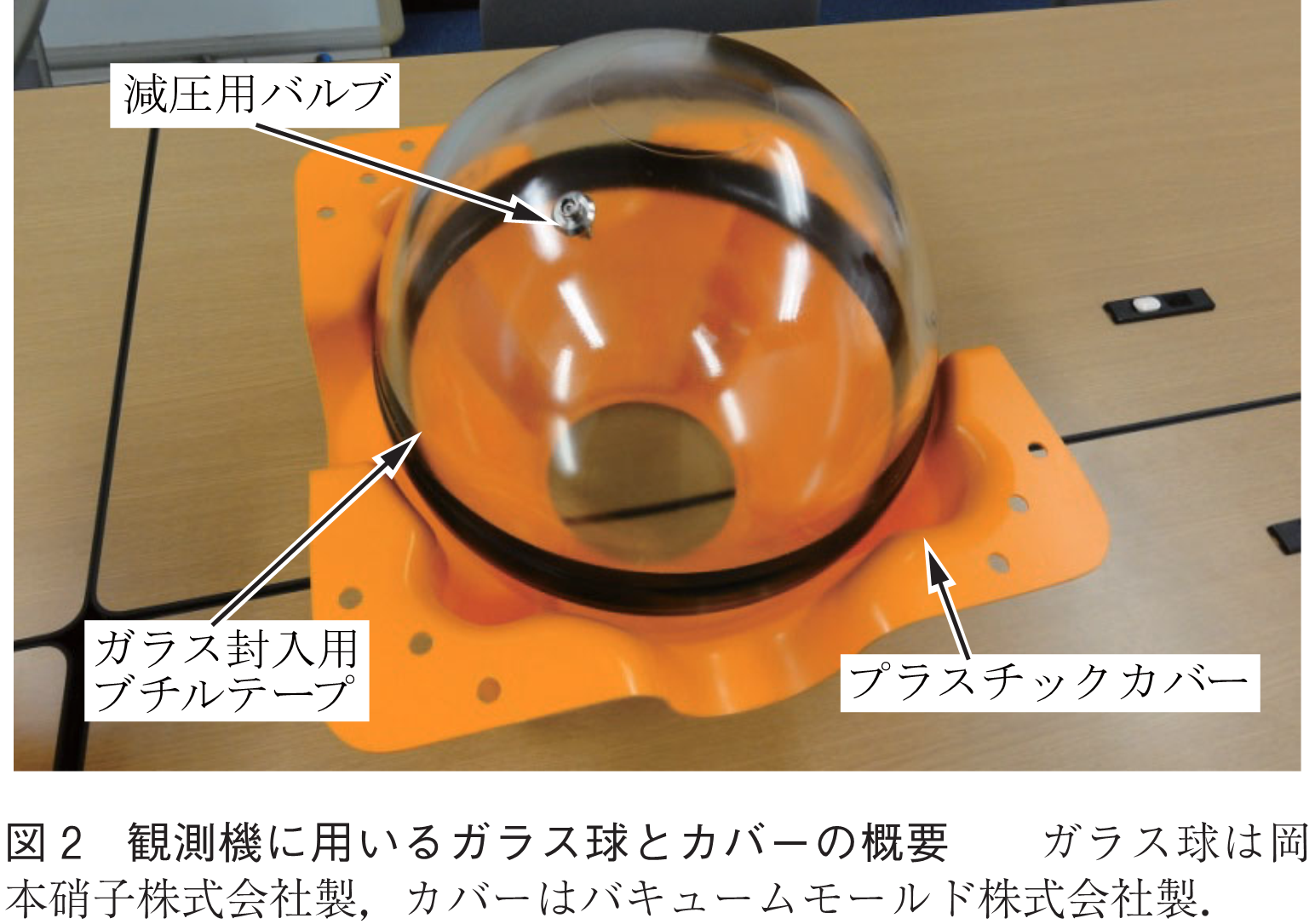
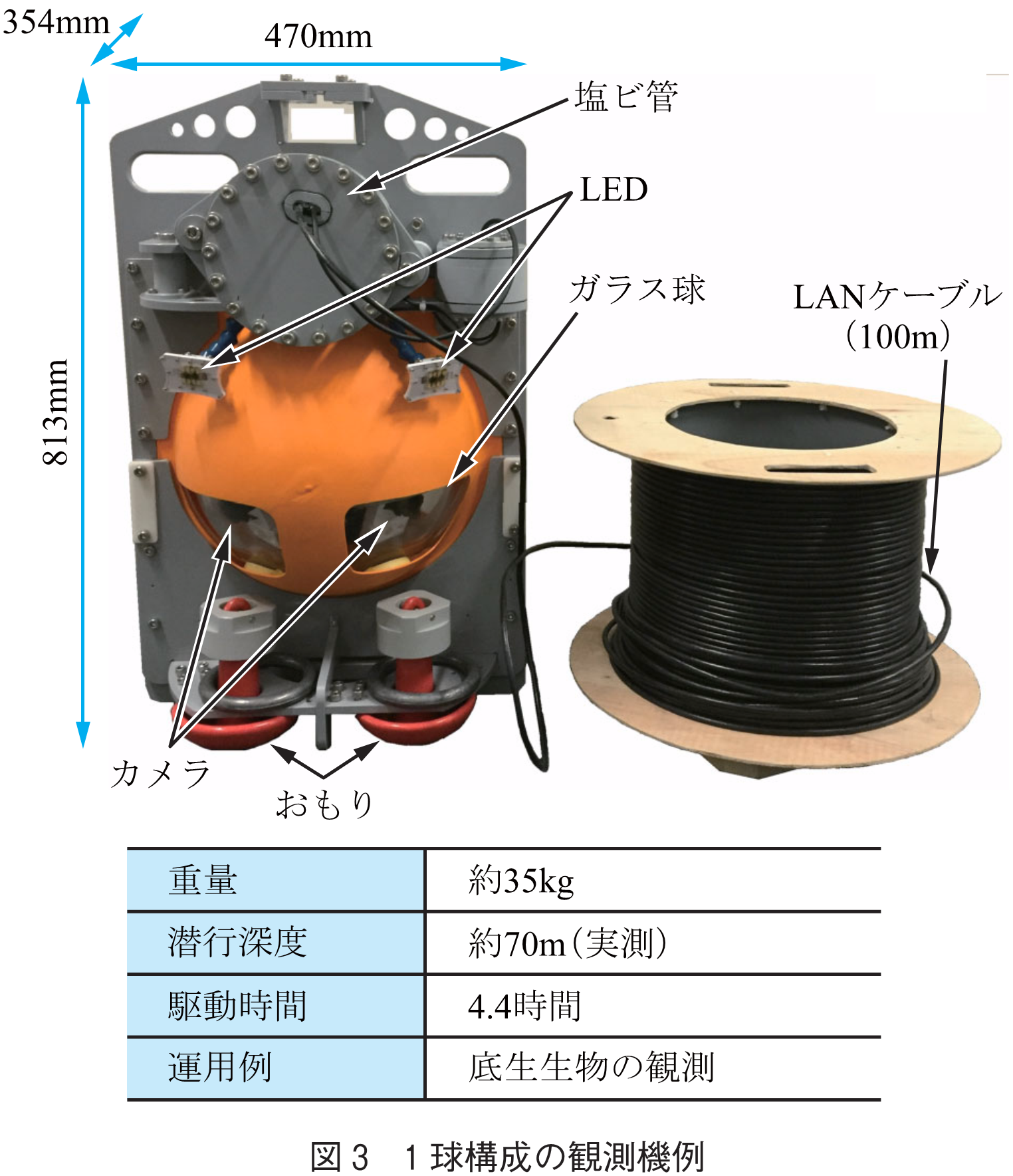
図3には1球構成での観測機の例を示す.1,000m以上の超深海ではローブの重量が負担となり,簡易な観測機構成であったとしても運用が大掛かりとなってしまう.そのため,江戸っ子1号のような切り離し装置を備えた構成の運用が容易である.また,100~200m程度であれば図3のようにLANケーブルによる観測機との通信が可能となる.その場合,観測機内部に陸上で用いられるWiFi環境を適用することができ,LANケーブルの接続されたルータとは誘電体通信を用いることでガラス球に特殊な加工なしで陸上と同じ無線環境の構築が可能となる.
市販のセンサで江戸っ子1号を構成する四つの球内に図4に示す配置で温度センサ①(ADT7411,アナログデバイセズ社製)と温度センサ②(103AT-11-FT,セミテック社製),気圧センサ(MPL115A1,フリースケール社製)を設置し測定を行っており,配置に配慮することで精度は低いが,測定した結果からガラス球内部からも海洋環境に相当する情報が得られることが確認できている.一様な圧縮力がかかるような極限環境ではガラス球のような容器により,陸上の高機能な回路,システムの適用可能性がある.ガラス球の封入は図2に示すように粘着テープによる方式が用いられることが多い.データの取得や電源の交換のために海上でガラス球を開封することは,塩害等により回路等に腐食等のダメージを与えることが予想されるため,できるだけ開封を避けることが望ましい.そのためにも,極限環境のシステムに高速な無線データ転送技術と給電技術の発展が望まれる.
海洋に流入するマイクロプラスチック,そしてプラスチック製廃棄物が紫外線等で分解されて生じる粒径350µm以下のスーパーマイクロプラスチック(SMPs)は,その性質とサイズにより,海洋生物により吸収・蓄積されやすく,人体への影響の懸念が指摘されている(8).海洋SMPsの主要な発生源とその生成メカニズム,そして生体への影響を正しく評価するためには,SMPsの海洋中の分布を明らかにすることが必要である.しかし,広い海洋の中で,深海まで潜水してSMPsを調査するのは容易ではない.現在,海洋で使用されている観測機器は,温度,海流,塩分濃度,撮影が主な目的であり,海上及び海中に浮遊する微粒子の測定までは目的としていない.そのため,SMPsの海洋深さ方向の分布を調査するためには,ROV,AUVが用いられるが(9),機器の開発に費用がかかり,運用も大型船舶を必要とするため,限られた台数と限られた研究機関での運用に限られる.これは,直接的な経済的リターンをもたらさない海洋SMPsの分布測定に適しているとは言い難い.更に,SMPsの観測と分析を仮に海面上のみに限定したとしても,依然問題がある.まず,船舶で350µm以上のメッシュの大きさの網を曳航することで固体を収集する.収集した固体は陸上に持ち帰り,主にFTIR(フーリエ変換赤外分光光度計)分析またはラマン分光分析により,プラスチックの種類を特定する.ここで,FTIR,ラマン分光の分析においては,分析対象が真にSMPsであることが求められるため,その前処理として,微生物,生物組織を手作業で排除・除去することが求められる.現状では,SMPsと非SMPsを区別・分離するための専門家の協力と陸上における分析機器なしに実施は難しい.
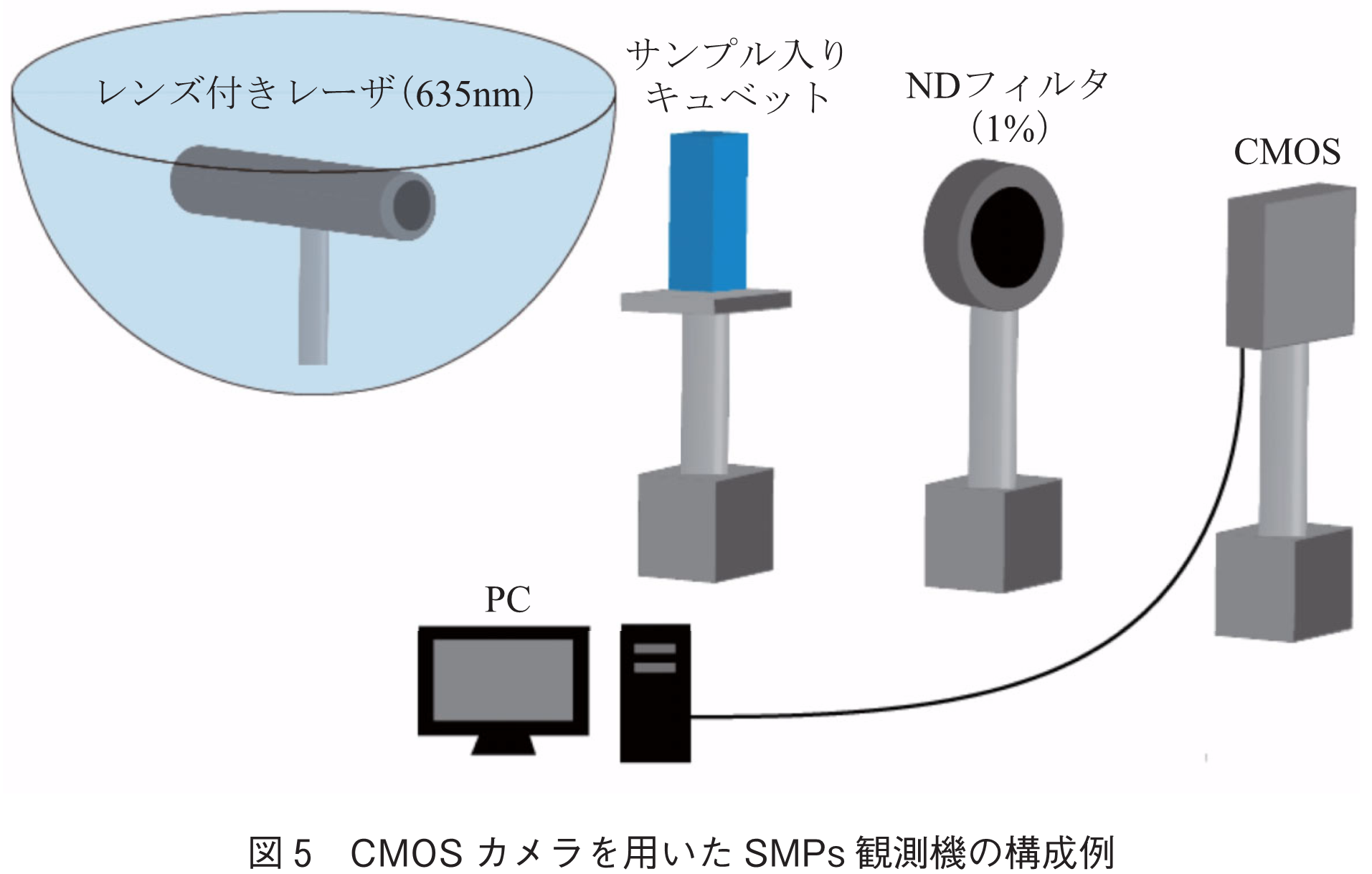
ここで,ガラス球は透明であるため,外部への光学的アクセスが容易であり,適切な光学系と光微小機械システム(Optical MEMS)を導入すれば,FTIRに匹敵する高度な分析を非接触で行える可能性がある.現在までに図5に示すようにCMOSカメラとレーザ光源を組み合わせて生物組織(BS: Brine Shprimp)とSMPsの分離が可能な検出方法を開発している(10)~(13).
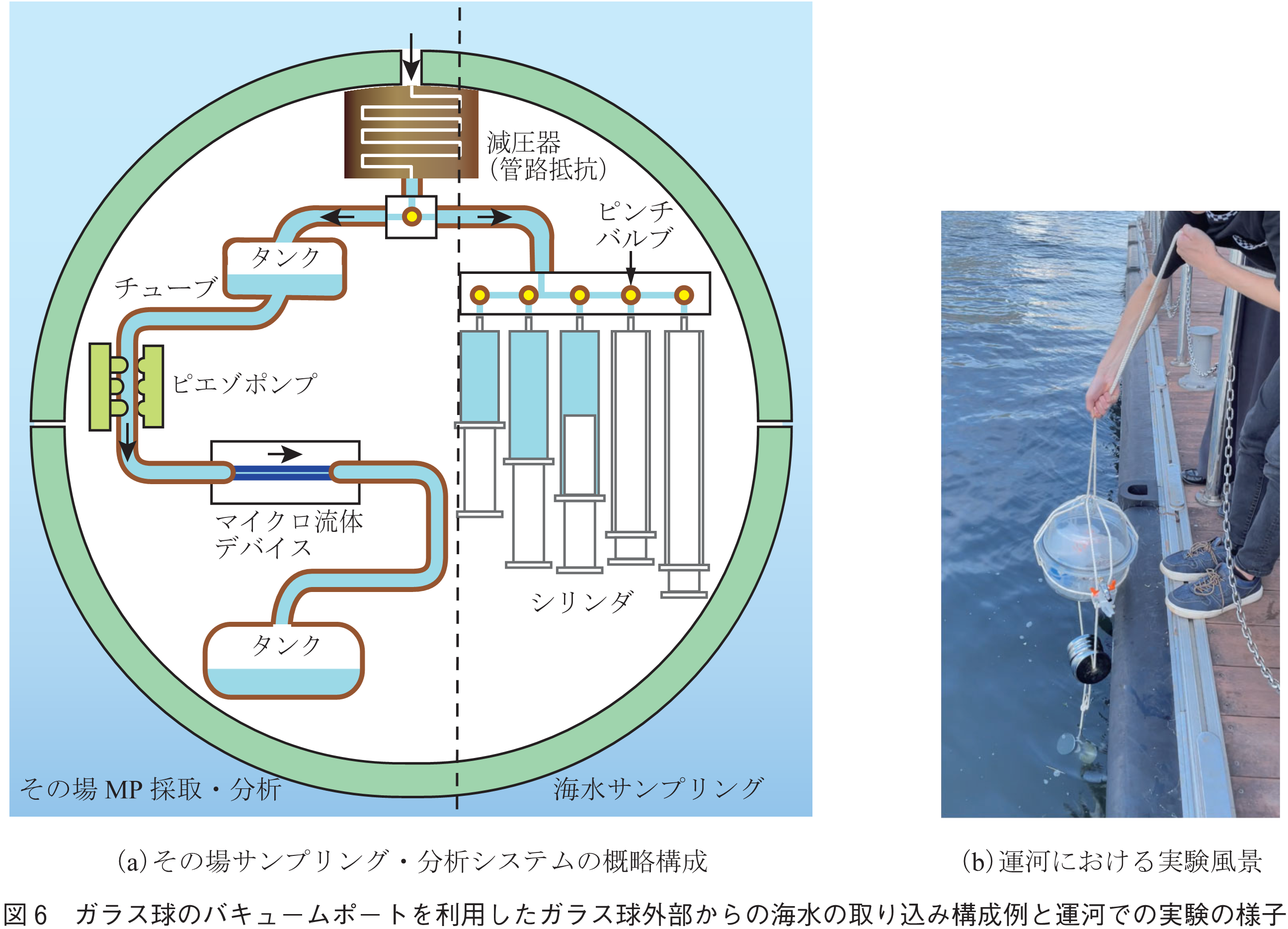
また,海中での原位置海洋MP連続抽出のために,珪藻を付着させた模擬MP粒子をマイクロ流路内で捕獲し,有機物から粒子を分離する機構について検討を行っている(14).更に深海中のその場分析においては,高圧の海水を減圧してガラス球内に導入する必要がある.図6に示すように,海水を,管路抵抗の高いマイクロ流路で減圧後に通常の分析・サンプリング系に通す方法を検討した.高圧の海水を減圧するためのマイクロ流路として,ミアンダ流路を用いている(15).
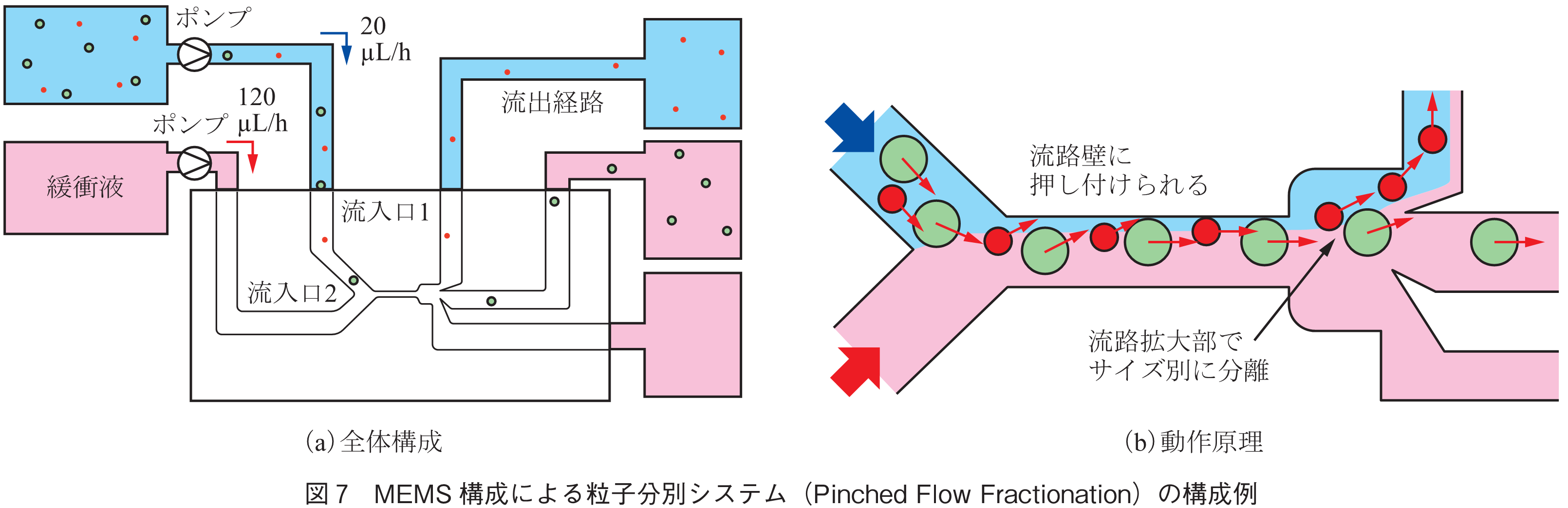
ガラス球内での連続的なSMPs解析デバイスとして,PFF(Pinched Flow Fractionation)による粒子径サイズを分画するデバイスを検討している.図7に本分画デバイスの原理を示す.SMPsを含んだ減圧後の海水サンプルは,一次フィルタで濃縮され,本デバイスに送られる.本デバイスでは,クリーンなバッファ流とサンプル流が狭い流路(Pinched Flow流路)で合流する.SMPはバッファ流(図中ピンクの流れ)で流路壁面に押し付けられるため,SMPの粒子サイズによって粒子の中心位置が流路内を流れる位置が決まる.マイクロチャネル内の流れは層流のため,流路幅を急激に拡大させると,各サイズの粒子の位置の差も拡大される.拡大された位置の差を利用して,各サブ流路で異なる粒子サイズのSMPを集めることができる(16).
海洋の深さ方向のSMPsを含めた海洋浮遊微粒子の分布を明らかにするためにガラス球から成るフリーフォール型海中無人探査機をベースに検討を進めている.海中のその場分析が実現されることで,MPsの環境負担の把握だけでなく,海中生物由来の新しい酵素の発見も可能となり,製薬等への大きな貢献を期待している.
(1) 江戸っ子1号プロジェクト公式サイト.
http://edokko1.jp
(2) 森野博章,清水悦郎,“ガラス球を用いたフリーフォール型探査機「江戸っ子1号」の開発と深海魚類撮影実験の概要,”信学技報,ASN2014-76, pp.189-194, July 2014.
(3) 町工場の底力 深海をめざす,子供クラブ(編),かもがわ出版,京都,2014.
(4) 橋本 惇,服部陸男,“耐圧ガラス球を用いた深海カメラシステムの試作について,”海洋科学技術センター試験研究報告(1), pp.26-31, 1977.
(5) 橋本 惇,服部陸男,名執 薫,青木太郎,“フリーフォール方式耐圧ガラス球入り深海カメラシステム,”海洋科学技術センター試験研究報告(3), pp.24-28, 1979.
(6) T. Tsuchiya, “Ocean testing for developing of the utilization deployment promotion program “Free-fall type deep sea investigation shuttle device Edokko-1” End of south at Japan Trench,” R/V KAIYO Cruise Report KY13 E05, 2014.
(7) 小池義和,森野博章,栗原邦彰,糸井成夫,河上 達,清水悦郎,“耐圧ガラス球内部計測データによる潜航・浮上運動解析,”JAMSTEC Report of Research and Development, vol.19, pp.49-58, 2014.
(8) B, Jiang, A.E. Kauffman, L. Li, W. McFee, B. Cai, J. Weinstein, J.R. Lead, S. Chatterjee, G.I. Scott, and S. Xiao, “Health impacts of environmental contamination of micro-and nanoplastics: a review,” Environmental Health and Preventive Medicine, vol.25, Article 29, 2020.
(9) C.A. Choy, B.H. Robison, T.O. Gagne, B. Erwin, E. Firl, R.U. Halden, J.A. Hamilton, K. Katija, S.E. Lisin, C. Rolsky, and K.S. Van Houtan, “The vertical distribution and biological transport of marine microplastics across the epipelagic and mesopelagic water column,” Scientific Reports, vol.9, 7843, 2019.
(10) D. Endo, T. Kono, Y. Koike, U. Maheswari Rajagopalan, and J. Yamada, “Laser speckle imaging with a deepsea submersible sphere in discrimination of microplastics and microplanktons,” SEATUC 2021 Proceedings, pp.128-133, 2021.
(11) 遠藤大樹,ラジャゴパラン ウママヘスワリ,河野貴裕,小池義和,山田 純,“深海潜水球によるマイクロプラスチックとマイクロプランクトン区別用レーザースペックル法:準備実験,”第67回応物春季予稿集,B409-12, 2020.
(12) 遠藤大樹,ラジャゴパラン ウママヘスワリ,小池義和,河野貴裕,山田 純,“レーザスペックル差分法によるマイクロプラスチックとマイクロプランクトンの分別,”第81回応物秋季予稿集,Z17-12, 2020.
(13) 佐藤詩織,遠藤大樹,河野貴裕,小池義和,門野博史,山田 純,ラジャゴパラン ウママへスワリ,“レーザースペックル法によるマイクロプラスチックがブラインシュリンプ(BS)に与える影響の検証,”日本光学会年次学術講演会,17pA7, 2020.
(14) 黒嵜由佳,児玉龍政,小池義和,二井信行,“離散化側壁流路とin situ Fenton反応による海水からのマイクロプラスチックの分離,”化学とマイクロ・ナノシステム学会,第42回研究会,4P-15, 2020.
(15) 児玉龍政,黒嵜由佳,小池義和,二井信行,“マイクロ流体減圧を用いた海中その場サンプリングシステムの開発,”日本生体医工学会関東支部若手研究者発表会2020, B-1-05, 2020.
(16) K. Shimomoto and S. Nagasawa, “Continuous size classification device for marine microplastics by pinched flow fractionation,” International Microprocesses and Nanotechnology Conference (MNC 2021), p.5-18, 2021.
(2021年11月1日受付 2021年12月9日最終受付)




オープンアクセス以外の記事を読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()