|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|

モビリティの最新技術と今後の展望

1.
スマートモビリティの進化と安心安全なまちづくり
Evolution of Smart Mobility for Safety Purpose in Super Smart Town


現在の自動運転車は自車のセンサを用いた自律走行により運転されている.今後導入が進められるスマートモビリティでは,路側機などのインフラと協調する安全運転支援や,路側機やクラウド上のディジタルツインによる安全運転支援が行われ,自動運転の安全性が向上するだけでなく,安心安全なまちづくりにつながる.本稿では,これらのスマートモビリティの進化に関する技術動向を紹介し,更に最新の技術を活用した安心安全なまちづくりの実証実験や将来展望を解説する.
キーワード:スマートモビリティ,自動運転,インフラ協調,ディジタルツイン,安心安全なまちづくり
自動運転車を活用したスマートモビリティのサービスが世界的に実用化されつつある.例えば自動運転タクシーのサービスは,アメリカではフェニックス,サンフランシスコにおいて,中国では北京,上海,深圳,広州,蘇州において,限定的な条件で運用が始められている.一方我が国では,ドライバー不足の課題を解決するために,路線バスや長距離トラックで自動運転の活用が検討されている.しかし現状の自動運転車は,自車のセンサのみを用いた自律型自動運転を行っており,人間が運転する場合と同様に事故が発生している.
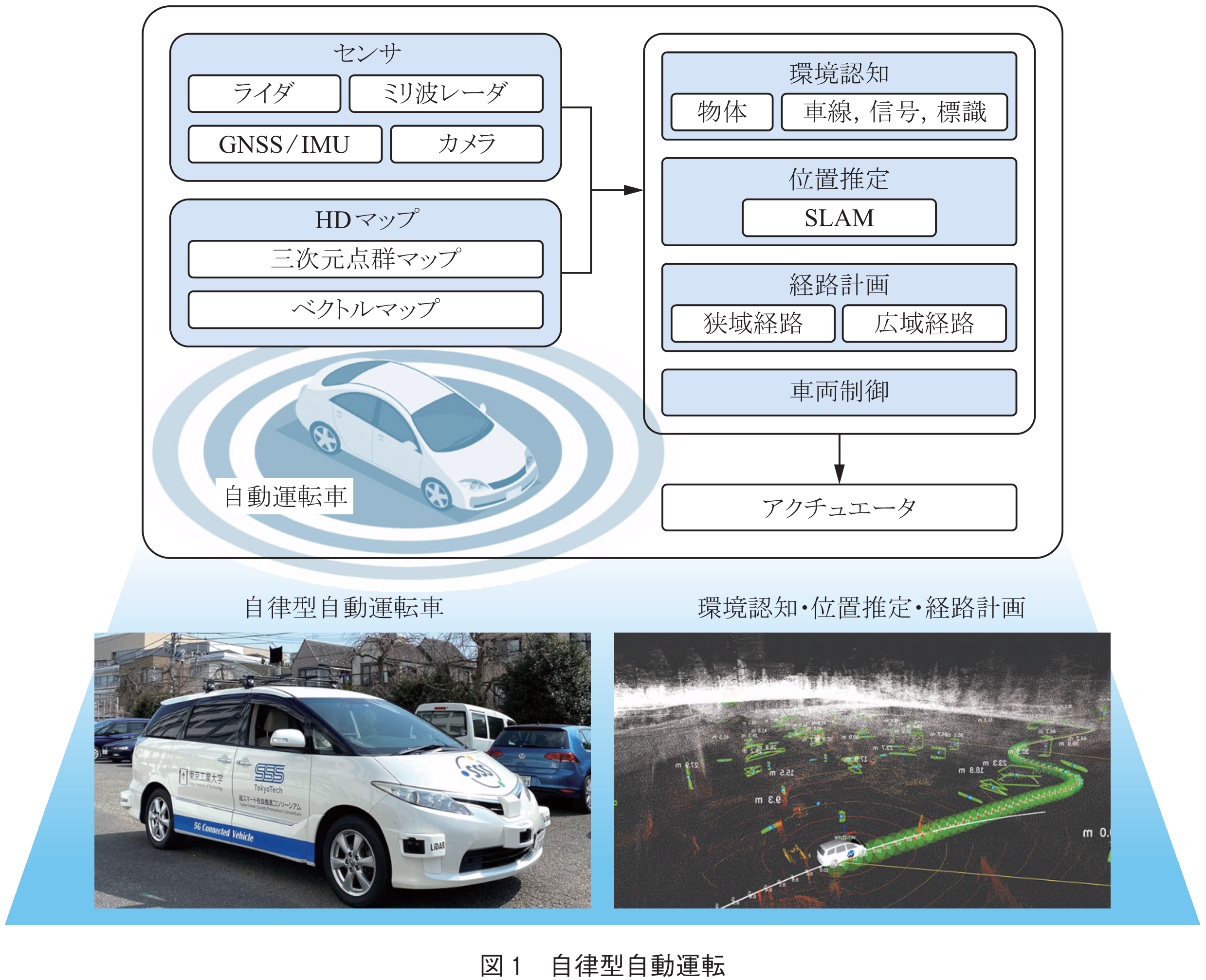
自律型自動運転のシステム構成を図1に示す(1).自律型自動運転は,現状の人間が運転する場合と同様に,ライダ(LiDAR: Light Detection And Ranging)やカメラなどのセンサを用いた環境の認知,センサと三次元点群マップを用いた自己位置推定,車線などの情報を含むベクトルマップと環境認知の結果を用いた経路計画,及びアクチュエータを制御する車両制御から構成されている.図1左下の大岡山スマートモビリティ教育研究フィールドに導入されている自律型自動運転車には六つのライダとカメラがセンサとして導入されており,図1右下のように環境認知・位置推定・経路計画を行っている.
自動運転を含む現状の交通システムの課題は安全性の向上にある.特に我が国の道路は,市街地において路肩が狭く見通しの悪い交差点が多数存在し,自律型自動運転では安全性を担保することが困難な状態にある.そこで本稿では,これらの課題を解決する策として近年研究開発が進められているインフラ協調及びディジタルツインによる安全運転支援を紹介する.
自律型(自動)運転の課題を解決するために,インフラ(路側機)や他車と協調する安全運転支援が構築されてきた(2).また安全運転支援のレベルは,車車間通信(V2V: Vehicle-to-Vehicle)/路車間通信(V2I: Vehicle-to-Infrastructure)及び環境認知技術の発展に伴い,協調認識メッセージ(BSM: Basic Safety Message, CAM: Cooperative Awareness Message)から集合認識メッセージ(CPM: Collective Perception Message),そしてセンサ拡張(Extended Sensors)へと高度化されている.ここでは,これらのインフラ協調による安全運転支援技術を,V2X通信(Vehicle-to-Everything)の発展の歴史と合わせて概観する.
図2にインフラ協調による安全運転支援のシステム構成を示す.図1の自律型自動運転と比べると,インフラ(路側機)と他車が安全運転支援を行うために追加されており,それらが自車とV2X通信(V2I+V2V)により接続されている.V2X通信の代表的な規格であるDSRCやITS-G5は2010年頃に標準化され,北米や欧州において普及が進んでいる.当初はカメラやライダなどの環境認知技術が進んでいなかったため,安全運転支援として最も基本的な車車間での協調認識メッセージ(BSM/CAM)の交換や,路車間での道路情報の配信が行われていた.しかし全ての車両がV2X通信を具備しているわけではないため,環境全体の認知に課題があった.
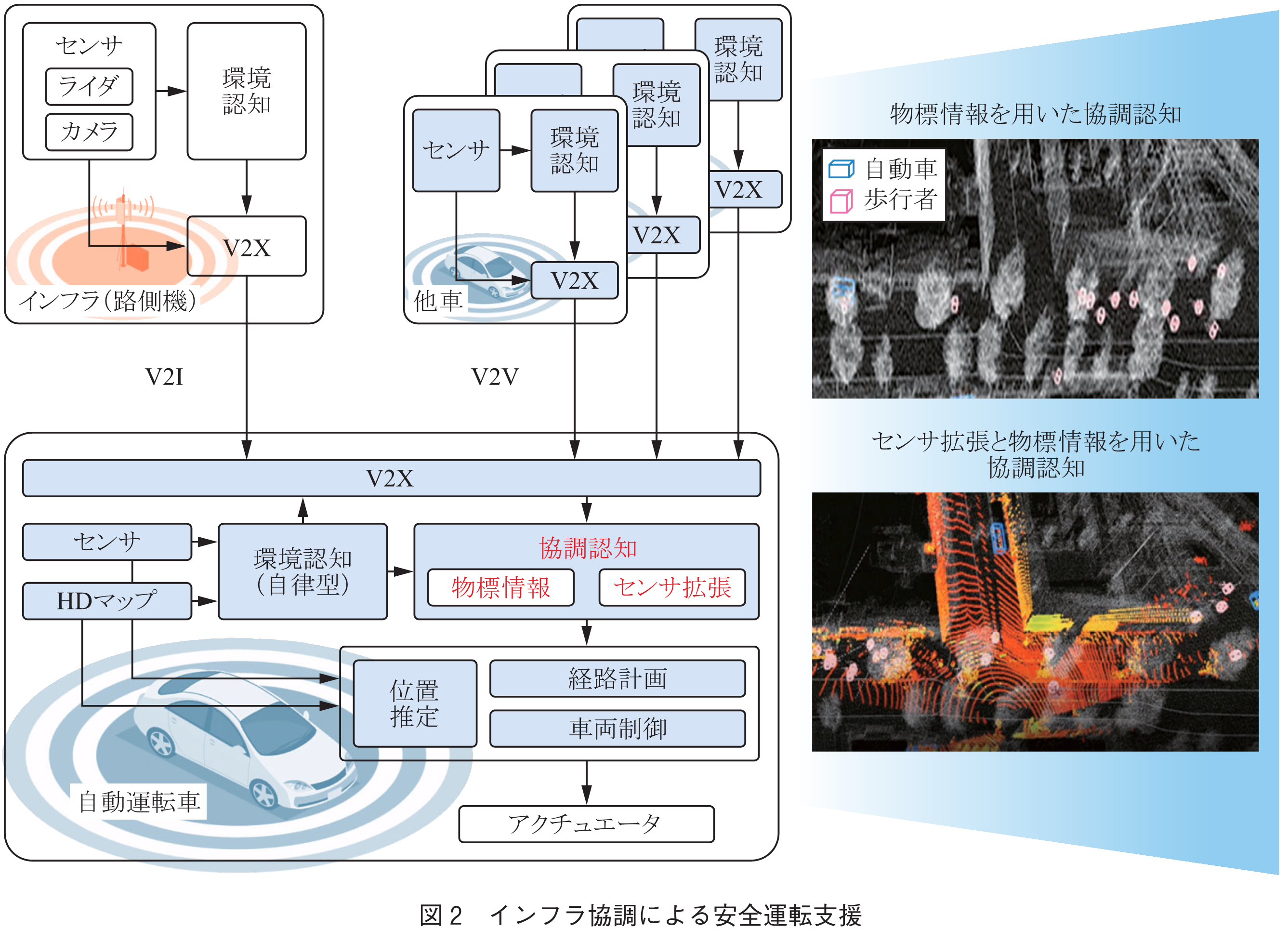
一方2016年に標準化された集合認識メッセージ(CPM)では,協調認識メッセージに加えて,路側機や他車のセンサで検知された物体(自動車・自転車・歩行者)の物標情報(物体の位置,速度,方向,サイズなど)が交換可能となったため,安全運転支援のレベルが引き上げられた.2014年には3GPP(The 3rd Generation Partnership Project)においてC-V2X通信(Cellular V2X)が規格化され,車ネットワーク間通信(V2N: Vehicle-to-Network)が実現されるとともに,DSRC/ITS-G5に比べてより大容量なV2X通信を可能にした.後述する中国の蘇州市でのスマートシティプロジェクトでは,C-V2Xを用いた集合認識が行われている.
2020年には,3GPPにおいて5G対応のNR-V2X通信(New Radio V2X)が規格化され,更に高度な安全運転支援が実現されようとしている.センサ拡張は,NR-V2Xの大容量低遅延通信を活用し,自車の安全運転に必要となる路側機や他車のセンサ情報をユニキャストやマルチキャストによって直接収集する方法である(3).近年では,CAMをネットワークの制御に用い,CPMとセンサ拡張を要求条件によって使い分けるヘテロジニアスV2Xが主流となりつつある(4).
フィジカル空間の物体やシステムをサイバー空間に再現するディジタルツインの技術は,製造や建設などの第二次産業の分野で急速に発展し,近年では医療や教育及びEコマースなどの第三次産業に応用され,また農業や漁業などの第一次産業にも拡張されつつある(5).ディジタルツインのメリットは,サイバー空間におけるコンピュータビジョンを活用した可視化だけでなく,センサやIoTを活用した物体やシステムのリアルタイムな状態の把握,シミュレーションやAI/生成AIを活用した予測,予測に基づいたシステムの最適制御や異常回避にある.ディジタルツイン構築の難易度は,物体やシステムのダイナミックスによって異なる.車体の製造やビルの建設では,ダイナミックスが低いためディジタルツインの導入が容易であるが,モビリティはダイナミックスが高いためこれまでディジタルツインが実現されてこなかった.
しかし近年,モビリティの分野においても,センシング技術,AIを用いた物体検出技術,V2Xや5G等の通信技術,ポイントクラウド/3Dマップ技術,交通シミュレータを用いた予測技術などの発展によりディジタルツインの構築が可能になり,ディジタルツインによる安全運転支援に期待が高まっている(6).ここでは,ディジタルツインによる衝突回避,遠隔運転,複数車制御など,これまでのインフラ協調では達成し得なかった安全運転支援・交通効率改善支援などについて紹介する.
図3にディジタルツインによる安全運転支援のシステム構成を示す.図2のインフラ協調による安全運転支援と比べると,エッジやクラウドにディジタルツインが導入されている点が大きく異なる.ディジタルツインを活用した安全運転支援の最も顕著なものが交差点における衝突回避である.交差点に設置されたインフラ(路側機)を用いて,交差点に進入する交通参加者(自動車・自転車・歩行者)を検知し,その情報を共有するだけでなく,エッジサーバ上の狭域ディジタルツインを用いて交通参加者の数秒後までの経路を予測することで衝突を検知する.また交通参加者の種類に応じて,衝突予測の通知を行うことで行動変容を促し衝突を回避する新たな取組みである.
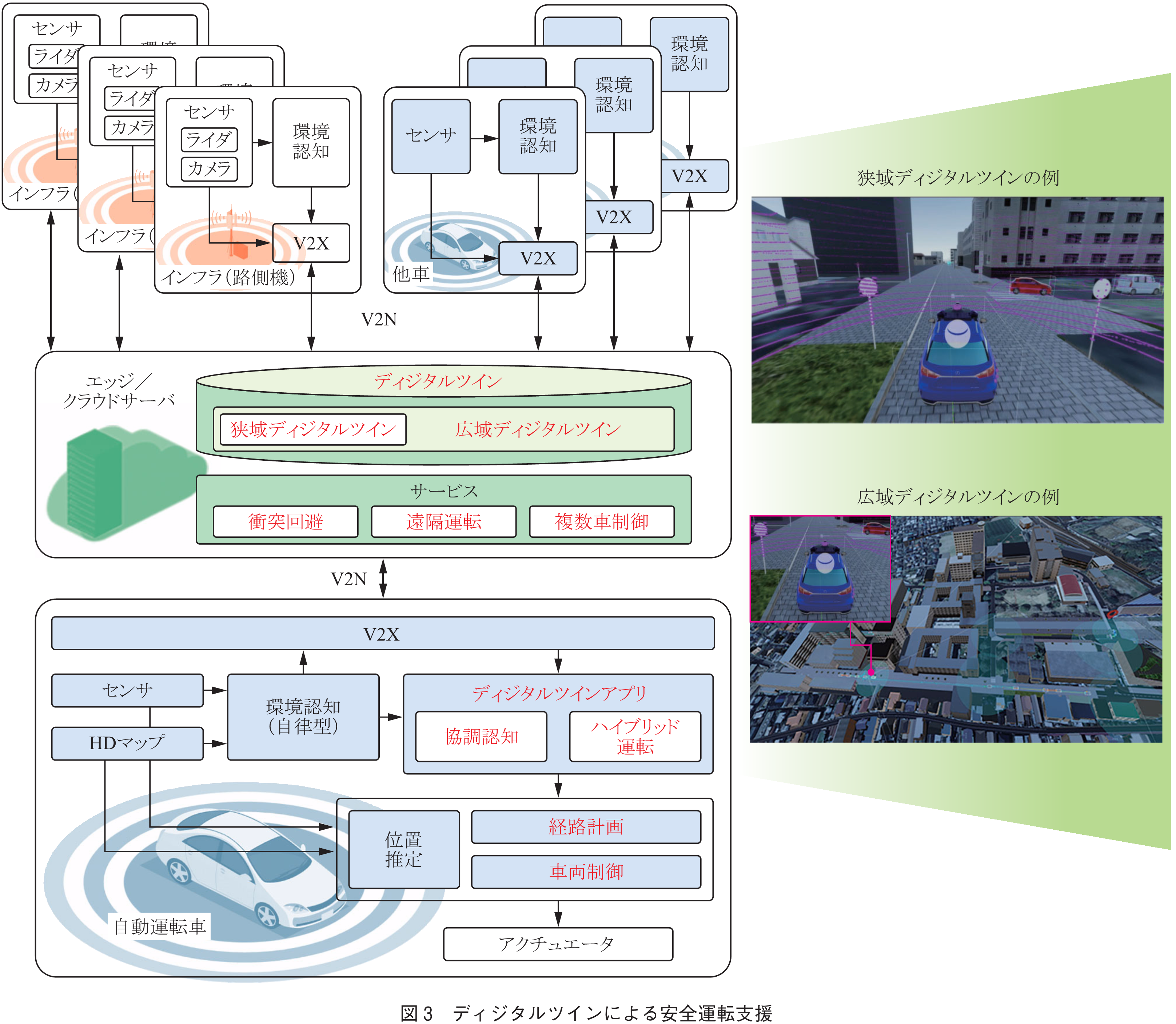
ディジタルツインによる安全運転支援の第2の方法はディジタルツインによる遠隔運転である.特にクラウドサーバ上の広域ディジタルツインでは,自動運転車の経路上の情報だけでなく周辺道路の情報を収集することができるため,より安全で効率の良い経路のダイナミックな選択が可能になる.更に自動運転車による自律運転とディジタルツインを用いた遠隔運転のハイブリッド自動運転も可能になる.衝突回避などの狭域の車両制御は狭域ディジタルツインの情報を活用しつつ自動運転車が行い,一方広域の経路制御は広域ディジタルツインが行う新たなアーキテクチャであり,狭域と広域の両面からの安全運転支援が実現される.
ディジタルツインによる安全運転支援の第3の方法はマルチエージェント最適化を用いた複数車制御である.狭域ディジタルツインでは,複数車を同時に制御することで交差点や合流における交通流を最適化することが可能になり,一方広域ディジタルツインでは,例えば複数の自動運転車を用いた配送効率などを最適化できる.すなわちディジタルツイン上でモビリティのサービスを構築できる時代がすぐそこまできているのである.
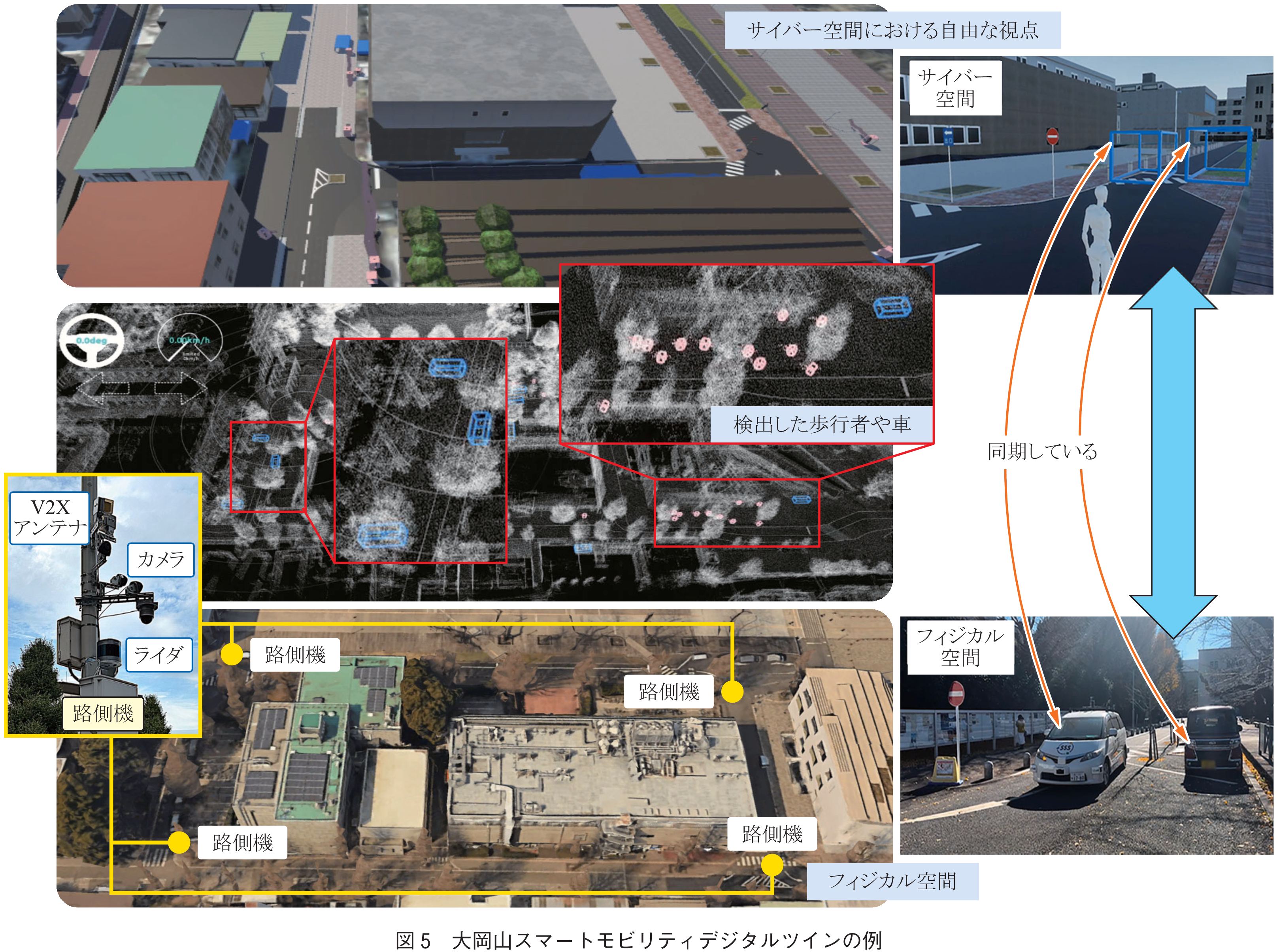
ここでは,東京工業大学(現東京科学大学)大岡山キャンパスに構築されたスマートモビリティデジタルツインを紹介する.筆者らは,超スマート社会推進コンソーシアム(7)の参加機関と連携して,2019年度から大岡山キャンパスにスマートモビリティ教育研究フィールドを構築してきた(8).スマートモビリティ教育研究フィールドには,レベル4/5の自律走行が可能な自動運転車が2台配備されているだけでなく,次世代ITS(Intelligent Transport Systems)に導入が予定されている路側機が4台設置されている.路側機には,ライダやカメラなどのセンサ,760MHz・5.7GHz・60GHzをサポートするV2X通信,エッジコンピューティング(MEC),及びクラウドへのバックホールネットワークが配備されており,2.で紹介したインフラ協調による安全運転支援が実現されている.スマートモビリティデジタルツインは,これらのフィジカル空間のモビリティフィールドをサイバー空間にリアルタイムに再現したものであり,ディジタルツイン上でリアルタイムに衝突予測や経路計画などを行うことで,3.で紹介したディジタルツインによる安全運転支援が可能になる.
スマートモビリティデジタルツインのシステム構成を図4に示す.スマートモビリティデジタルツインは,フィジカル空間の自動運転車と路側機,エッジ及びクラウドサーバ,エッジ/クラウドサーバを含むネットワーク全体をオーケストレートする仮想化プラットホーム,仮想化プラットホーム上のサイバー空間で動作するROS(Robot Operating System)及び自動運転システム用ソフトウェアパッケージ(Autoware),静的なディジタルツインである大岡山ポイントクラウドマップ/3Dマップ,Unityなどの3D可視化ソフトウェア,最後にこれらの基盤上で動作する動的なスマートモビリティアプリケーションから構成されている.自動運転車や路側機などのエッジサーバでは,ライダやカメラなどを用いて周辺の自動車・自転車・歩行者などの交通参加者を検知し,車両周辺や交差点などの狭域ディジタルツインを構築する.更に複数の車両や路側機で検出された物標情報をクラウドに集約し,ポイントクラウド/3Dマップに重畳することでスマートモビリティ教育研究フィールド全体の広域ディジタルツインが構築される.狭域のディジタルツインと広域のディジタルツインから成る階層化構造(階層数は任意)を取り入れることで,衝突回避や配送最適化などの異なる要求条件を持つスマートモビリティのユースケースを両立することが可能になる.
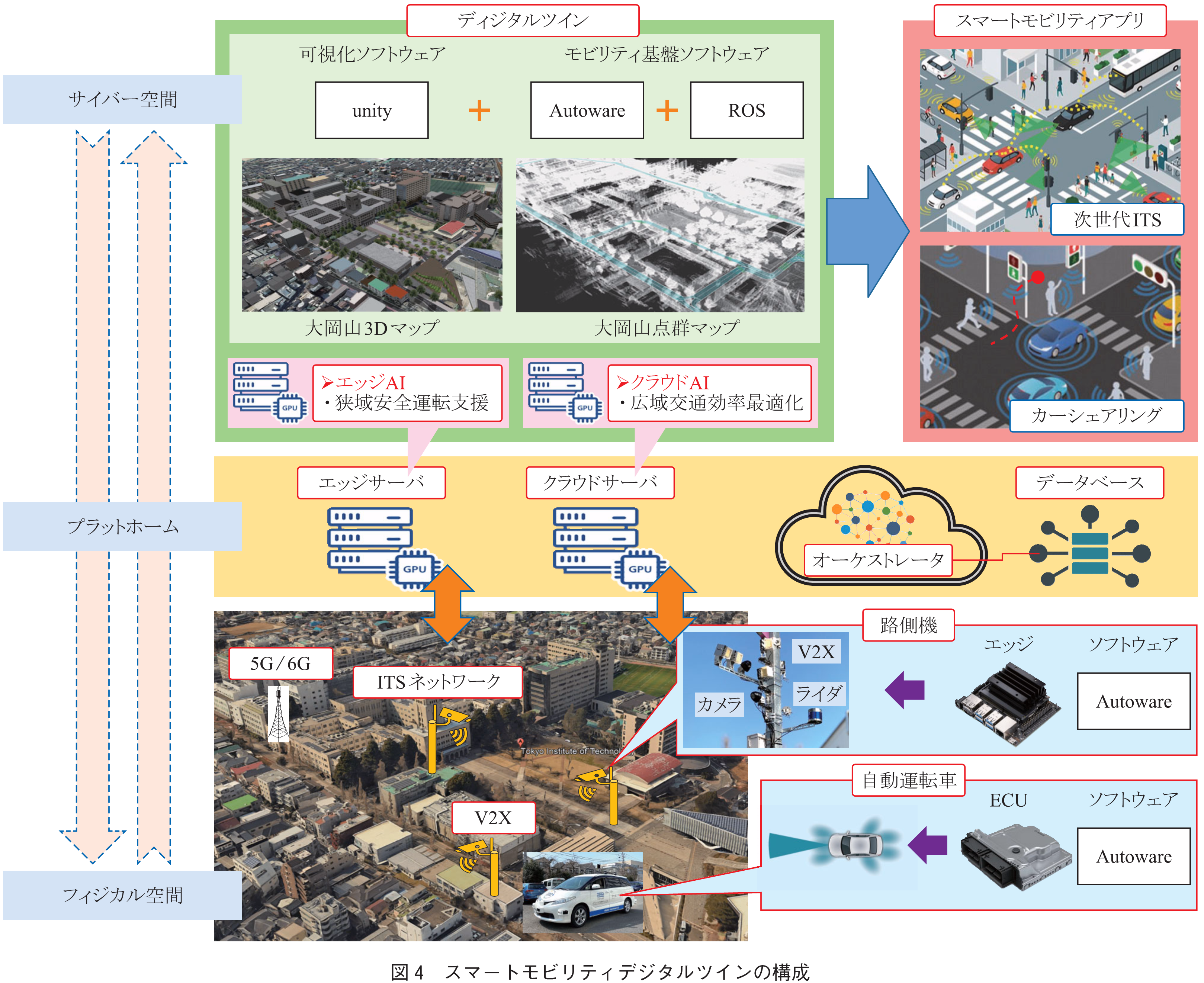
図5に大岡山スマートモビリティデジタルツインの例を示す.最下部にはフィジカル空間における車両や路側機の写真が掲載されており,最上部にはサイバー空間の3Dマップに重畳された自動車(青)や歩行者(ピンク)の情報がリアルタイムに表示されている.詳細は文献(9)の動画像を参照されたいが,狭域ディジタルツインでは10ms程度,広域ディジタルツインでは100ms程度の遅延が存在するが,フィジカルツインとディジタルツインがほぼリアルタイムに同期していることが分かる.真ん中はポイントクラウドに重畳された検出結果が,ライダなどの検出範囲とともに示されている.複数の路側機での検出結果がフュージョンされていることが分かる.
ここでは4.で紹介した大岡山スマートモビリティデジタルツインを活用した安心安全なまちづくりの実証実験の例を二つ示す.一つ目は見通しの悪い交差点での衝突回避であり,二つ目は自律と遠隔のハイブリッド自動運転である.いずれのユースケースにおいてもディジタルツイン上でのAIを用いた予測が新たな価値を生み出している.
図6に交差点での衝突回避の実証システムを示す.見通しの悪い死角のある交差点における自動車・自転車・歩行者間の出会い頭事故をスマートモビリティによって軽減する取組みである.交差点に設置された路側機のセンサを用いて自動車・自転車・歩行者を検知し狭域ディジタルツインを構築する.更にAIを用いて検知された交通参加者の数秒後までの経路を予測(緑線)することで,交差点で発生する衝突事故を予測する.衝突回避の方法は,交通参加者の種類によって異なる.図6では,交通参加者が自動車と歩行者である場合を示し,衝突回避の警告を歩行者が持つスマホのナビゲーションシステムに表示する方法を採用した.路側機のAIが検出した衝突予測情報を,5Gを介してユーザのナビゲーションシステムに通知する方法である.衝突までの予測時間に応じて,注意喚起,死角情報,停止警告の表示が順次行われていることが分かる.
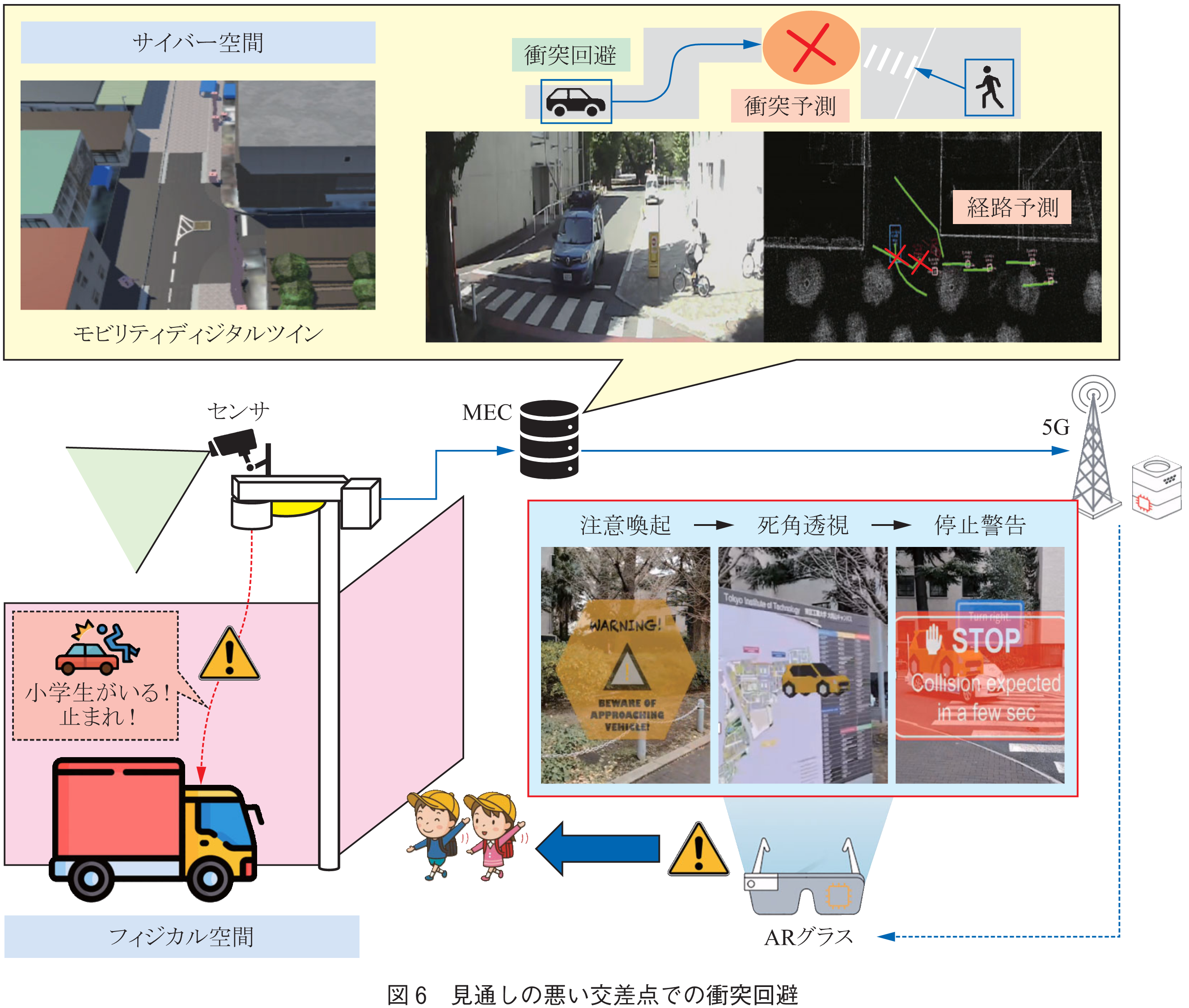
図7に自律と遠隔のハイブリッド自動運転の実証システムを示す.実証システムでは,自動運転車のディジタルツインをサイバー空間に構築し,サイバー空間の広域ディジタルツイン上で経路計画を行う.また選択された経路をフィジカル空間の自動運転車にフィードバックし,フィジカル空間の自動運転車が選択された経路と自車のセンサを用いて自律型の車両制御を行っている.自律型自動運転の視界は人間が運転する場合と同様に車両の周辺に限られるのに対して,広域ディジタルツインでは自動運転の経路上及びその周辺の道路の状況をリアルタイムにかつ俯瞰的に観測することができるため,より安全で効率的な経路をリアルタイムに選択することができる.実証実験では,サイバー空間上の自動運転車が広域ディジタルツインを用いて経路上の停車車両と多数の歩行者を検知したため,より安全で効率的な周辺道路へ経路変更を行い,変更された経路をフィジカル空間の自動運転車にフィードバックすることで,自律と遠隔のハイブリッド自動運転が実現されている(10).

最後に将来展望を述べる.本稿で述べた路側機などのインフラとディジタルツインを用いた安全運転支援は安心安全なまちづくりに大きく貢献する.中国蘇州市のスマートシティプロジェクトでは既に一部機能の導入が進められている(11).我が国でも,既に設置されている見守りカメラにディジタルツインを導入することや,通学路にスマートポールを導入するなど,自治体が先頭に立って安心安全で効率性の高いまちづくりを行う必要がある.
謝辞 本成果の一部は,情報通信研究機構(NICT)の高度通信・放送研究開発委託研究(#22404)の一環として行われたものである.ここに記して感謝の意を表したい.
(1) L. Liu, S. Lu, R. Zhong, B. Wu, Y. Yao, Q. Zhang, and W. Shi, “Computing systems for autonomous driving: State of the art and challenges,” IEEE Internet of Things Journal, vol.8, no.8, pp.6469-6486, April 2021, doi: 10.1109/JIOT. 2020.3043716.
(2) A. Caillot, S. Ouerghi, P. Vasseur, R. Boutteau, and Y. Dupuis, “Survey on cooperative perception in an automotive context,” IEEE Trans. Intelli. Transp. Syst., vol.23, no.9, pp.14204-14223, Sept. 2022.
(3) K. Sakaguchi, R. Fukatsu, T. Yu, E. Fukuda, K. Mahler, R. Heath, T. Fujii, K. Takahashi, A. Khoryaev, S. Nagata, and T. Shimizu, “Towards mmWave V2X in 5G and beyond to support automated driving,” IEICE Trans. Commun., vol.E104-B, no.6, pp.587-603, June 2021.
(4) Z. Li, T. Yu, and K. Sakaguchi, “Het-SDVN: SDN-based resource management in heterogeneous V2X networks for cooperative perception,” IEEE Access, vol.11, pp.76255-76268, July 2023.
(5) S. Mihai, M. Yaqoob, D.V. Hung, W. Davis, P. Towakel, M. Raza, M. Karamanoglu, B. Barn, D. Shetve, R.V. Prasad, H. Venkataraman, R. Trestian, and H.X. Nguyen, “Digital twins: A survey on enabling technologies, challenges, trends and future prospects,” IEEE Communications Surveys & Tutorials, vol.24, no.4, pp.2255-2291, Sept. 2022.
(6) X. Hu, S. Li, T. Huang, B. Tang, R. Huai, and L. Chen, “How simulation helps autonomous driving: A survey of sim2real, digital twins, and parallel intelligence,” IEEE Trans. Intelligent Vehicles, vol.9, no.1, pp.593-612, Jan. 2024.
(7) 超スマート社会推進コンソーシアム.
https://www.sss.e.titech.ac.jp/
(8) 阪口 啓,福田英輔,岩附信行,“東工大スマートモビリティ教育研究フィールドを活用した人材育成と研究開発,”自動車技術会誌,vol.76, no.11, Nov. 2022.
(9) 東京工業大学,“スマートモビリティデジタルツインを用いた自律と遠隔のハイブリッドな自動運転を実現,”2024年7月19日.
https://www.titech.ac.jp/news/2024/069619
(10) K. Wang, Z. Li, K. Nonomura, T. Yu, and K. Sakaguchi, “Smart mobility digital twin based automated vehicle navigation system: A proof of concept,” IEEE Trans. Intelligent Vehicles, vol.9, no.3, pp.4348-4361, March 2024.
(11) ITS Japan, 第29回ITS世界会議2023蘇州.
https://www.its-jp.org/katsudou/its_wc/suzhou_2023/
(2024年6月3日受付 2024年6月24日最終受付)




オープンアクセス以外の記事を読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()