|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
|
|
電子情報通信学会 - IEICE会誌 試し読みサイト
© Copyright IEICE. All rights reserved.
|
自動運転を支える情報通信技術の最新動向
小特集 1.
完全自動運転社会実現に向けた技術開発動向と課題
Review of R&D and Its Challenges for the Fully Automated Driving Society
Abstract
産業の中心となって久しい自動車の到達目標の一つである運転自動化が現実的なものになりつつある.2030年代の完全自動運転レベル5を実現するには,センサ,ネットワーク,EMC等多種にわたる更なる研究開発が求められる.また技術的課題だけでなく認証や法規制,サービス設計も含めた広いフィールドでの検討・検証が社会実装には必要不可欠である.本稿では,自動運転に向けた研究開発の歴史をひも解きながら技術課題の整理を行い,自動運転社会で実現するサービスや法規制の国際協調等を概観する.
キーワード:自動運転,MaaS,認証,法規制
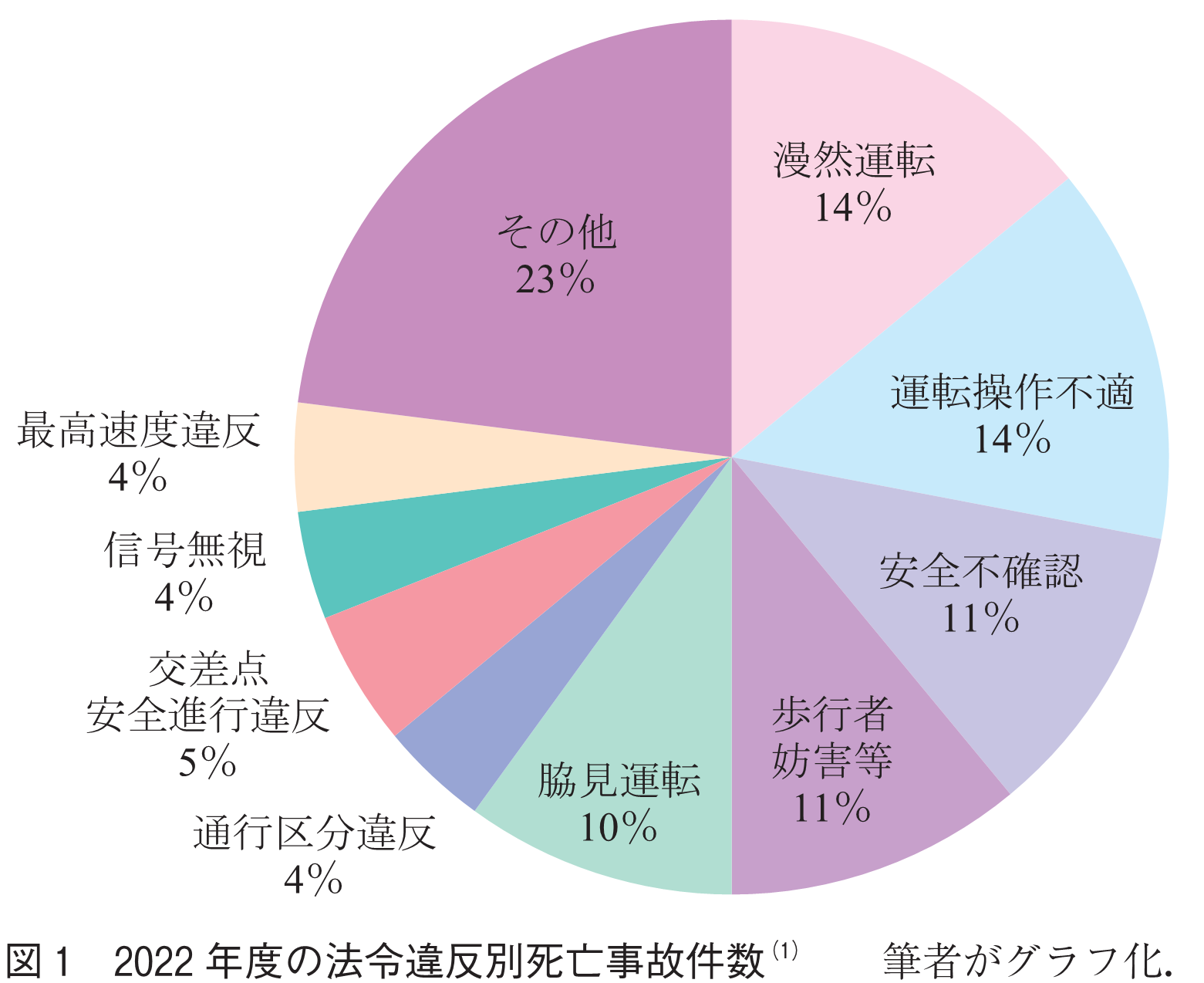
日本において交通事故死は1970年頃の年間1万7,000人及び1993年頃の1万1,000人を境にピークアウトしているものの,年間2,000人以上が亡くなっている.その原因として,漫然運転,運転操作不適,安全不確認で40%弱が占められるなど,運転タスクに起因する事故が多い(図1)(1).また,日本以外に目を向けると,自動車保有数が伸びている東南アジアやアフリカ諸国などで交通事故死者数が急増しており,自動車社会の進展に伴う死亡者は世界的に見れば右肩上がりである(2).このような不幸な事故をなくすため,安全運転支援技術,ひいては運転自動化に向けた研究開発が開始され既に半世紀以上の年月がたった.
自動車産業では,2016年に独ダイムラー社CEO Zetsche氏が提唱した「CASE」が次世代自動車・モビリティ産業の進む道筋であり,破壊的イノベーションになり得ると考えられている.Connected, Autonomous, Shared and Services, Electricの頭文字をとった造語であり,電動化(E)された車両が,ネットワーク接続(C)により路車間・車々間通信を行い,周囲情報を自己判断し自動運転(A)することで,新しいモビリティサービス(S)が実現できる.技術オリエンテッドのC,A,EだけでなくMaaS(Motor as a Service)に代表されるサービス・ビジネスモデルも含む産業全体の包括的な提言であり,自動車ハードの革新のみならず,モビリティサービスの重要性が込められている.しかしながら先端技術開発の推進だけでも既存の自動車関連メーカだけでは難しく,例えばCにはモバイル通信事業者,Eにはバッテリーメーカ,Aには計算機・プロセッサメーカ,SにはGoogleなどのインターネットサービスプロバイダなど多種多様なプレーヤ・ステークホルダーが絡む.これまで自動車メーカが主導してきた業界地図が,ネットワーク業界では今や当たり前となりつつあるサービス駆動開発によって塗り替えられ得る.ただし,サービスの確立・運用には,技術だけでなく法規制・規則類の検討と制定が大前提である.自動車運行は,重量1tを超える鉄の塊が,たかだか車線横幅3m程度の道路を縦横無尽に駆け巡るものであり,単純な一つのシステムミスがすぐさま重大事故を引き起こし得る.そのため,自動運転そのものの社会受容性を鑑みながら規則類を整備する必要があり,ステークホルダーだけでなく消費者代表等も入った検討会等で議論を尽くすのは必然である.このように,完全自動運転社会の実現には,技術だけでなく社会規範・規則等いまだ数々の高いハードルが立ち塞がっている.
本稿では,完全自動運転に向けた現状と課題について俯瞰する.技術詳細については,各分野の専門家が執筆している本小特集別稿を参照されたい.歴史や全技術分野にまたがった課題,サービスにおける課題と法規制等について集中して議論する.
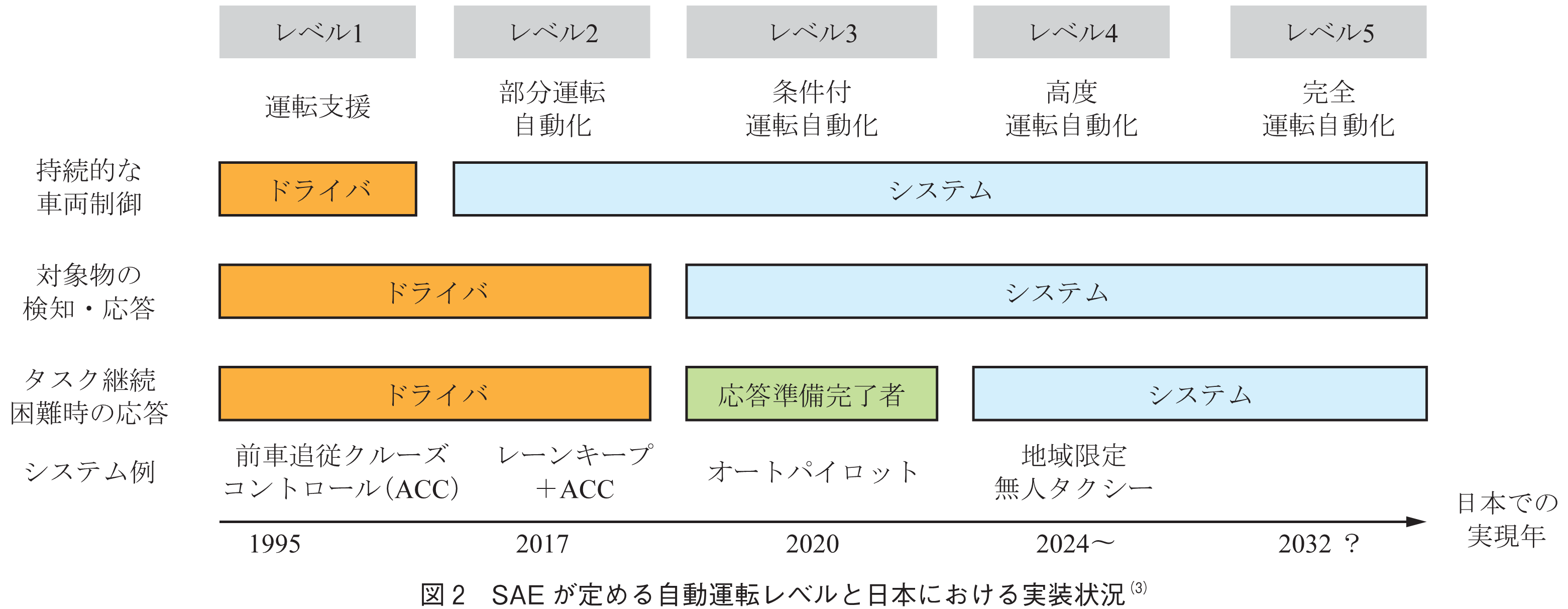
そもそも自動運転はどのような定義でなされているか.米国の自動車技術者協会SAE(Society of Automotive Engineers)に詳しく,日本,欧州ともその表記に倣っている.自動運転を,運転支援,部分運転自動化,条件付運転自動化,高度運転自動化,完全運転自動化の5段階に分けて議論が進められている(図2)(3).車両制御や対象物検知の運転者(ドライバ)・システムの主導性等でレベル分けされている.日本でもレベル3条件付運転自動化までは実車実装されており,レベル4高度運転自動化へ向けた実証実験が繰返し行われている.
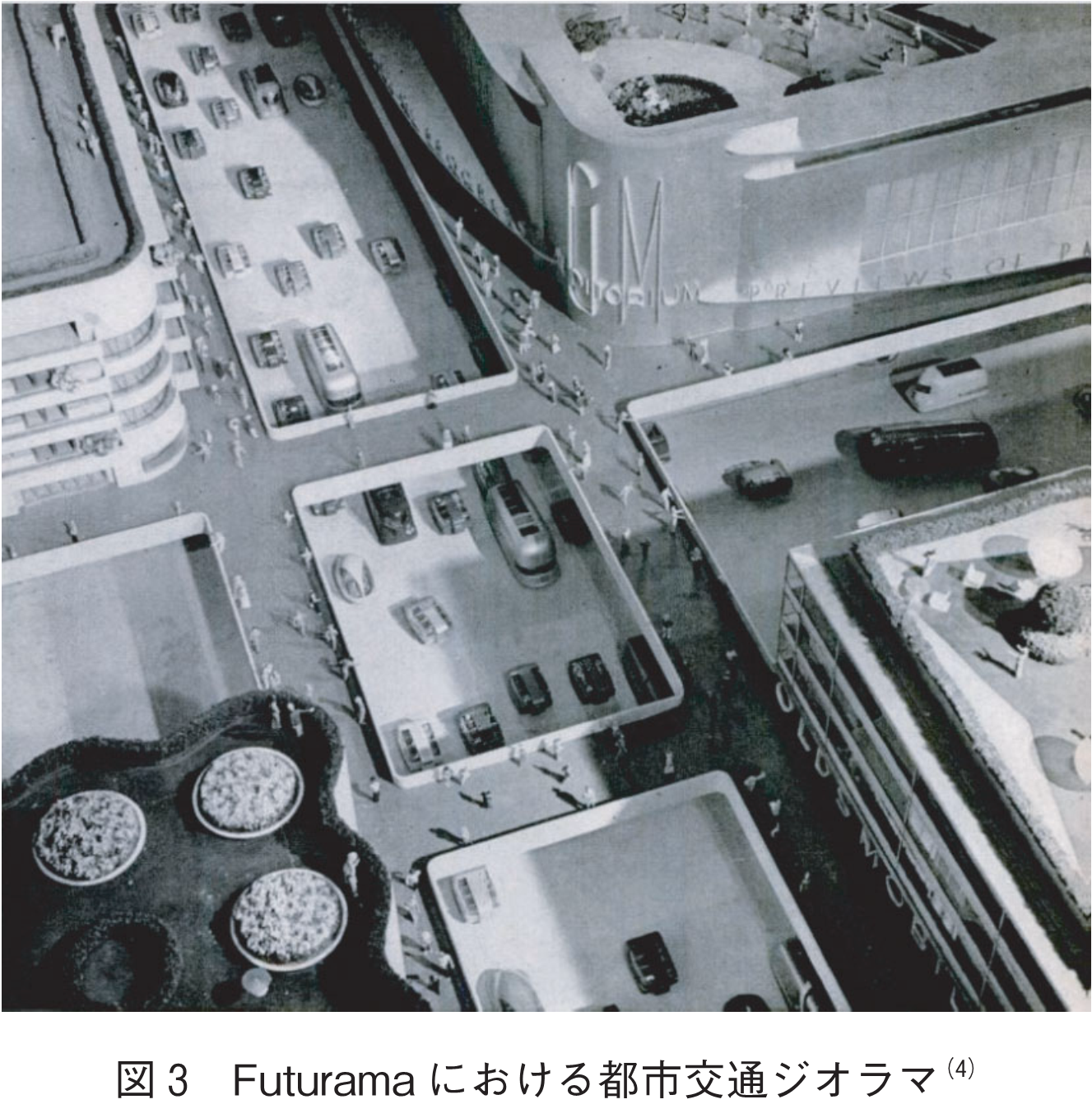
自動運転そのものの検討・研究開発の歴史は古い.例えば,米国General Motorsが1939年ニューヨーク万博で展示した未来社会のジオラマFuturama(FutureとPanoramaの造語)で,既に都市における歩車分離や自動運転車ジオラマが展示されていた(図3)(4).将来の都市社会のイメージであり自動運転社会そのものを指向したものではないが,その時代で既に運転者不要の自動車社会構想が検討されていた.特にFuturamaでは,都市交通網を高度方向の二階層に分けた完全歩車分離を提案している.当時,自動車による交通事故が急増していたための提案であったが,現時点から見ると,自動運転都市実現に向けた示唆に富んでいる.
1950年代からは道路上に誘導ケーブルやマーカを設置した路車協調技術による自動運転技術の研究開発が進められていたが,1990年代初頭に高度交通システムITSの概念が生まれると,道路交通情報システムVICSや自動料金支払いシステムETC(Electronic Toll Collection system),カーナビゲーションの高度化を進めつつ,専用試験道路に埋め込んだ磁気マーカによる自動運転・隊列走行技術の研究開発が更に進められた(5),(6).2005年の愛・地球博では会場内輸送手段として磁気マーカ自動運転隊列走行車両Intelligent Multi-mode Transit Systemが運用されるなど,2000年を境にして劇的に進化を遂げた.
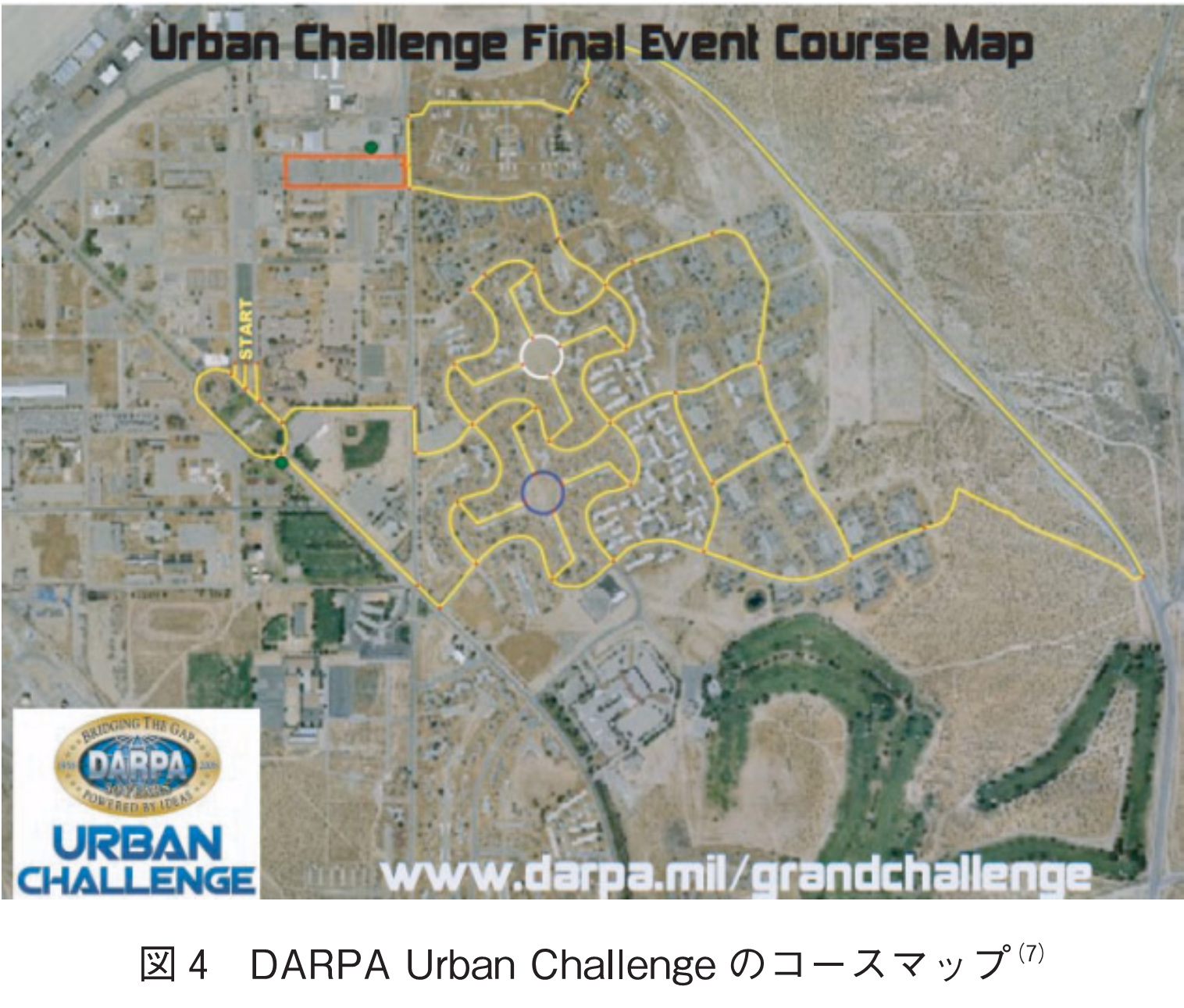
一方,この時期にひときわ一般の注目を浴びたのは米国国防高等研究計画局DARPAによるロボットカーレースDARPA Grand Challengeであろう.2004年から長距離無人走行に特化したレースを実施しており,第1回目のモハヴェ砂漠240km走行のゴール車はいなかったものの,2005年の212kmオフロードコース(制限時間10時間)ではスタンフォード大学をはじめとする複数のチームが完走している.都市域を想定した2007年Urban Challengeでは米国ジョージ空軍基地(現カリフォルニア物流空港)内に設置した交差点等を含む総延長96kmを6時間で走破することが求められた(図4)(7).このレースでは交通法規の遵守も求められ,他競技車の検出・回避なども必要であり,より現実の一般道路に即したものであった.このレースでは6チームが完走しており,日本でも新聞雑誌やテレビニュースでも取り上げられた.
一方,日本における自動運転技術の研究開発は国主導で開始された.通商産業省工業技術院機械技術研究所(現(国研)産業技術総合研究所)が1960年代の路面設置誘導ケーブルを用いた路車協調型自動運転車を試作し,1977年には世界初のステレオカメラを用いた自動運転車「知能自動車」を開発した(6).誘導ケーブル不良等を克服するため,車載センサのみでの自律自動運転検証として開発されたものであるが,後に左右後輪の走行距離差によって自己進行方向を推定する機能を追加して,実車検証を行った.知能自動車を更に発展させたPVS(Personal Vehicle System)プロジェクトでは,障害物検知用ステレオカメラと白線検知用モノクロカメラの3台で構成されたマシンビジョンを用い,テストコース内で直線時30km/h,カーブ時15km/h,交差点右左折時5km/hの完全自律自動運転に成功している(8).また検知された障害物・白線情報からマップ情報を生成するなど,現在のダイナミックマッピングにつながる技術開発も実施するなど先進的な取組みを進めていた.
このように長い技術開発の歴史がある運転自動化技術であるが,昨今のネットワーク接続容易性と半導体技術進展による計算速度の向上が現在の自動運転車技術の研究開発を急加速させている.例えば隊列走行は自車だけでなく他車位置・速度の把握と追従が重要であるため,通信技術の実装はなくてはならない.1980年代後半から開始された米国カリフォルニアPATHプロジェクトでは磁気マーカと800MHz帯マイクロ波通信により,高速道路専用レーン上で乗用車8台の隊列走行を実証した.新エネルギー・産業技術総合開発機構(NEDO)プロジェクトとして2008年度から4年間実施されたエネルギーITS推進事業では,専用クローズ道路上ではあるものの,3台トラック隊列走行を時速80km,車間距離10m以下を実証した(9).LEDによる空間光通信を車々間通信として開発・実装するなど,通信を用いた精密制御を達成した.近年では,車々間通信に低遅延な5Gモバイル通信を活用するなど,高度化する無線通信技術を積極活用することでコスト削減と機能性向上を図っている(10).
自動運転技術開発の急速な進展を支えてきた両輪の一つが計算速度の向上と低価格化である.一昔前ではスーパコンピュータに搭載されていたCPU,GPUがゲーム,AI向けに性能が急激に向上され,かつ,入手性も良くなったことで,高性能かつ高機能な信号処理・制御処理が可能になった.GPU開発会社NVIDIAは自動車向け製品ポートフォリオを拡充しており,2010年頃から自社製SoCをカーナビゲーションやディジタルインスツルメントパネル向けに出荷していたが,高い処理速度を武器にセンサ情報解析・信号処理向けチップも複数ラインナップしている.米国テスラ社はNVIDIAチップをレベル3自動運転向けに採用し活用していた.(現在は自社製チップへ切り替え中.)自車周囲情報や環境情報を高速に信号処理する必要がある自動運転車において,計算資源・計算速度の向上は欠かすことができない.2009年に自動運転の研究開発開始を公表したGoogleは自社データセンターで計算資源を潤沢に活用でき,膨大な計算量が必要なシミュレーション等を比較的容易に検証できるアドバンテージがあった.実際,お膝元であるカリフォルニア州マウンテンビューで2015年に自動運転実験の許諾を得て公道試験を開始し,一足飛びでレベル5完全自動運転を見据えた実車開発を開始した.現在は親会社Alphabetの傘下となった自動運転開発会社Waymoに業務を移管し,3年で800万マイル(約1,300万km)の実走行テストを実施するなど,先端技術をふんだんに使った試験を継続的に実施している(11).多数の実証試験を経て2023年8月,サンフランシスコ市での24時間自動運転タクシーの許諾をWaymoと米国General Motors傘下Cruiseが受託するなど,いち早くレベル4自動運転サービスが社会実装されつつある.
このように半世紀以上研究開発を続けてきた運転自動化・自動運転車が近年の技術革新によって実現に近づいてきたことは言うまでもない.次章では自動運転を支える技術群について概説する.
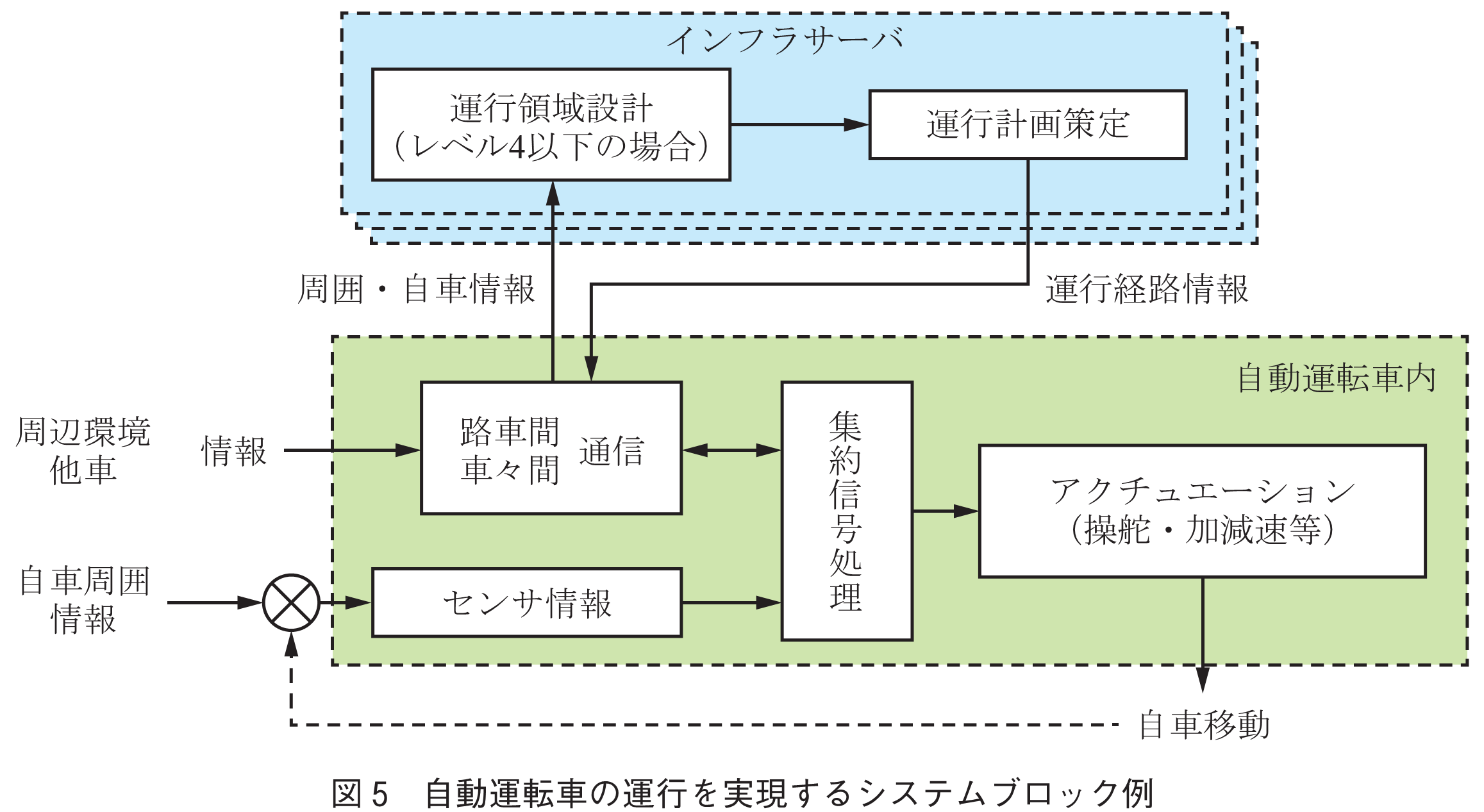
図5に自動運転を実現するためのおおまかなブロック図を示す.車両内では,搭載したセンサによる自車及び自車周囲情報と,路車間・車々間通信を介して得られた他車・周囲環境情報を用いて信号処理を行い,その結果をもって操舵・加減速等のアクチュエーションを行うことで車両移動を行う.加えて,処理結果を路車間・車々間通信を介して他車やインフラサーバへ送ることで地図情報・交通情報等のアップデートを行う.その際,自動運転レベル4以下では,位置情報や運行状況の運行領域設計(ODD: Operational Design Domain)準拠を確認し,自動車運行計画の策定・アップデートが行われる.センシング・プロジェクション・プロセッシング・アクチュエーションのサイクルを車両内と外部インフラサーバを含めて実行されている.これは,二重・入れ子型のサイバーフィジカルシステム(CPS)が実装されていることと同義であり,システム自律性だけでなくシステム間の高度な協調と連携が自動運転には欠かせないことが分かる.ここで,ODDはレベル4以下の自動運転システムにおける前提条件を示すものであり,道路条件,地理条件,環境条件,その他の条件で規定される.例えば,高速道路及び自動車専用道限定や天候状況,自動車制限速度,シートベルト着用有無や操作有無などの搭乗者状況などである.ODDはある程度パターン化・類型化することも可能であり,官民協議会や自動運転ベンチャーなどでパターン類型の議論がなされている(12).ODDから逸脱した場合は,システム機能を制限しつつ自動運転を継続させるフォールバック動作や,路肩等へ安全に停止させるミニマムリスクマニューバー,手動運転への切替えなどを実施する.つまり,ODDに基づく搭乗者・他車・歩行者などへのリスクを最小化させる機能の具備がレベル4自動運転車には必要である.一方,完全自動運転ではODDに基づく判断・計画立案が不要となるため,インフラサーバ及び自車内処理が逆に軽減される可能性もある.
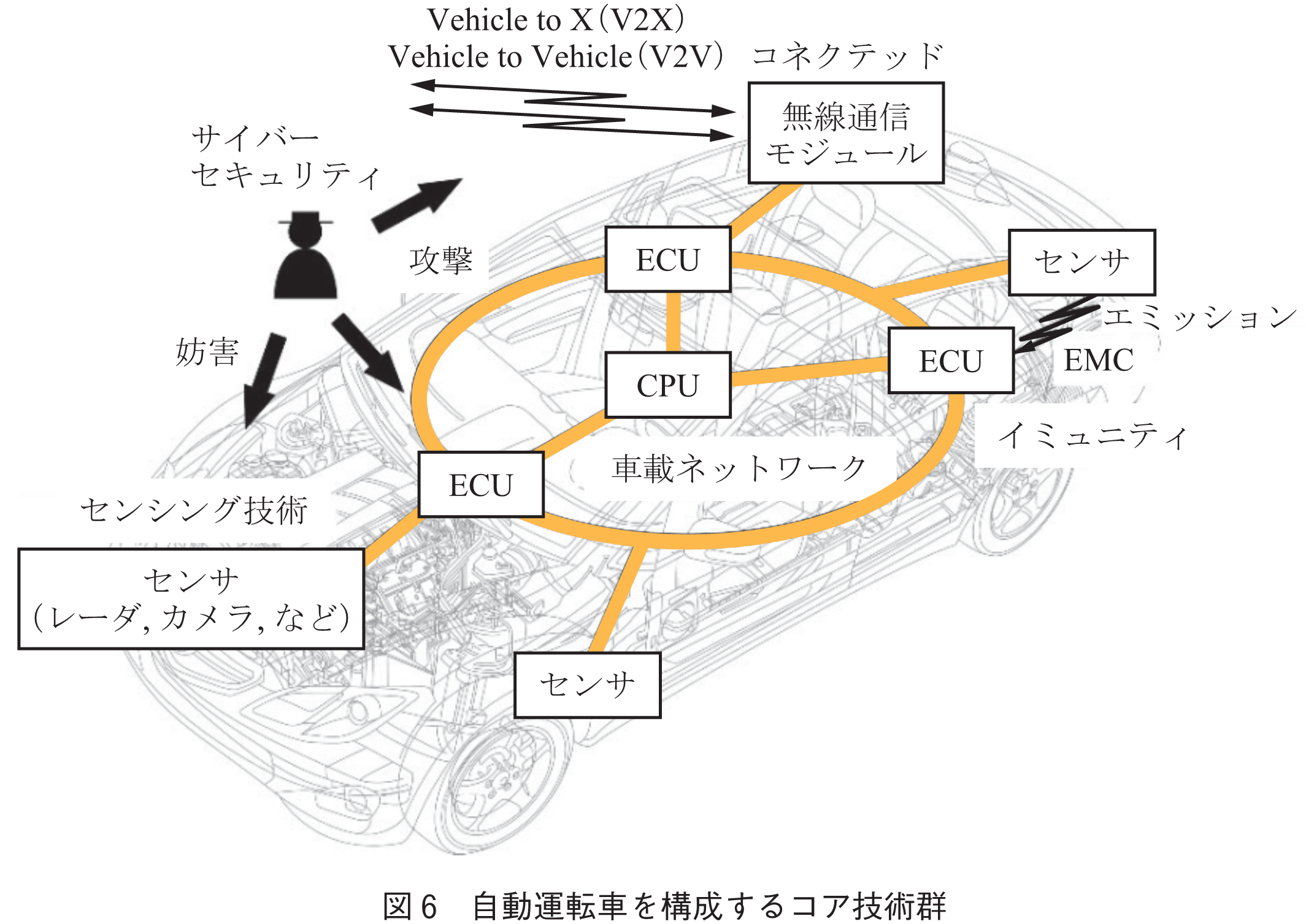
自動運転を支える技術は複数存在する.その中でもコア技術として,自動車とインフラ,自動車間を接続するコネクテッド技術,レーダ・カメラ等のセンサとその統合を行うセンシング技術,電子制御装置ECU,中央処理装置CPU間及びセンサ・ECU間を接続する車載ネットワーク技術,電気・電子デバイスからの不要電磁波放射とそれによる妨害を極小化するための電磁環境両立性(EMC: Electromagnetic Compatibility),中央処理装置内でセンサ等情報を統合して周囲状況を把握,運行計画とのマッチングやインフラサーバへ情報を適宜アップロードするための信号処理装置群,そして無線通信,センサ,ECUへ攻撃・妨害することにより自動運転車の安全な運行を妨げるサイバーアタックを防ぐサイバーセキュリティ技術である(図6).各論は別稿に譲るが,ここでは概説と横断的な議論を行う.
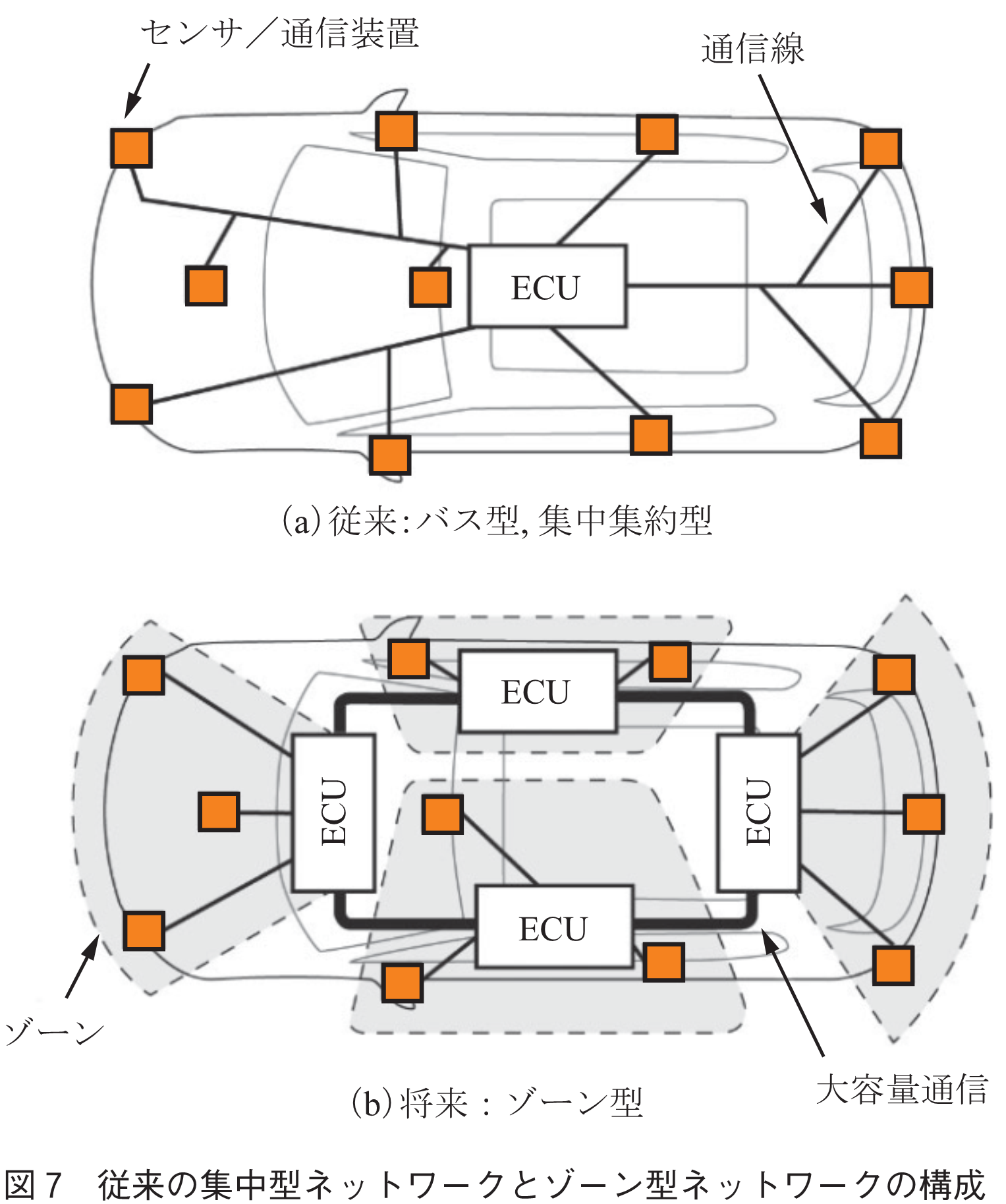
自動車内ではセンサ情報集約,通信制御,内部処理,アクチュエーションはそれぞれ別のECUで制御されることが一般的である.従来ではこれらの処理はそれぞれ基幹となるECUが担っていたが,配置するセンサ数の急増等により,機能ごとにECUを割り当て,それらを相互接続することで車両制御を行う方式が台頭してきた.従来は中央ECUにセンサ・制御系を収容するバス型・集中集約型ネットワークであったが,センサ等を収容した複数のECUをバックプレーンで接続するゾーン型方式への移行が検討されている(図7).ゾーン型方式ではECU間の接続は大容量が必要になるものの,適切位置へのECU配置が可能になることから,ネットワーク,電源含めた車両内ケーブル総長を削減することが可能となる.車両重量減に直結するため燃費・電費の向上に効果的である.事実,米国テスラ社や中国BYD社等では既にゾーン型方式を販売車に採用し始めている.またECUをネットワークスイッチと見立てることで,センサから所望ECUまでのネットワークパスを複数とることも可能になる.つまり,データセンターや5Gモバイル含む地上系ネットワークと同様,ソフトウェア制御によるネットワーク運用の効率化が期待できる.特に,安全運行に資するカメラ等の重要なセンサ情報はいち早く確実にECUへ送り届ける必要がある.QoS(Quality of Service)機能を活用し,優先度順に送り届けるなど,時間で区切った送受信機構が最適解の一つとなろう.Time-Sensitive Network(TSN)はIEEE802.1で規格化されており,産業用ネットワーク等で活用され始めている.自動車向けプロファイルの策定なども進んでおり,今後は車両内でもエンドツーエンドのネットワーク制御が重要となる(13).
EMC課題は2009年から2010年にかけて北米で騒動となったいわゆる「トヨタ・バッシング事件」を契機に一般に認知が広まった(14).電磁妨害(イミュニティ)等によるECU誤動作が原因ではないとの結論が出されたが,車両及び車載デバイスに対するEMC要求は年々高まっている.その際にネットワークの光化が重要な役割を果たす可能性が高い.車両の電磁放射,イミュニティへの耐性は保安基準で定められており,EMC性能向上を実現するには,システム全体だけでなくデバイス単体の設計も必須である.しかしながら現状では,電気ハーネスにより全ECUが電気的に接続されているため,個別ECUの電磁放射特性を電磁界解析等で評価したくとも切り離すことができない.結果として,各ECUを評価するにも,車両全体の電磁界解析をせざるを得ない.つまり,数mm程度以下のミクロな領域をセルとして区切り,数mに及ぶ車両全体を計算する必要があるため,計算リソース的にも効率的な設計プロセスの確立が非常に困難である.光ハーネス化することにより各ECUを電気的に遮断することができれば,設計のブロック化・セグメント化が容易となり,現実的な全車両EMC強じん化が実現できる.
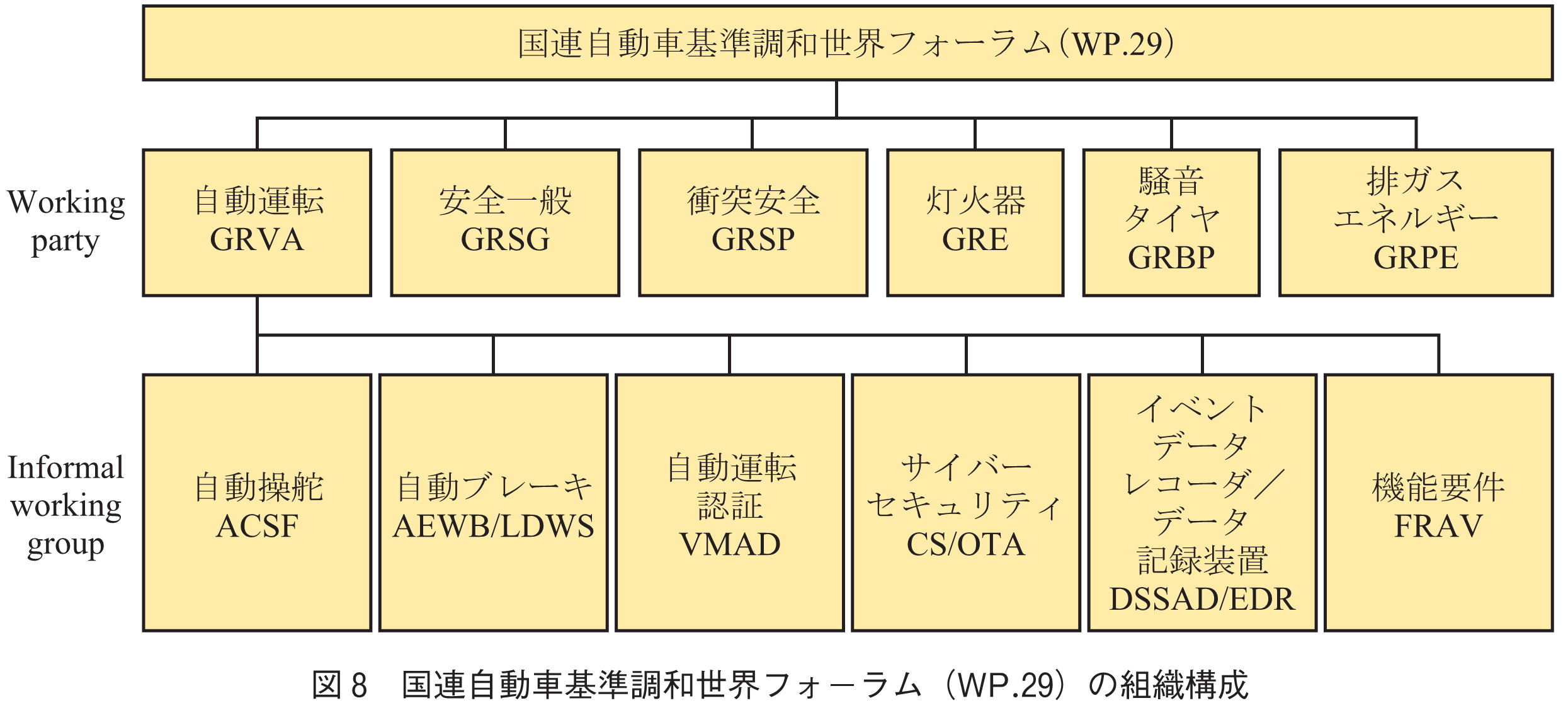
同様にサイバーセキュリティについても重要課題である.スマートキーのリレーアタックによる盗難被害等はニュースでも取り沙汰されている.OTA(Over the Air)でのプログラムアップデートはスマートフォンや家電製品では既に一般化され,米国テスラ社など海外製自動車でも採用が始まっているが,OTAアップデートに対してもサイバー攻撃が想定され,車載ECU等の安全性・真正性が毀損されかねない.そのため国連欧州経済委員会UNECEに属する国連自動車基準調和世界フォーラム(WP.29)でもサイバーセキュリティ専門の部会が設置され議論されている(図8).例えば,セキュアな自動車開発とその運用を規定するサイバーセキュリティ規則UN-R155では,自動車のサイバーセキュリティに関するリスク管理やソフトウェアアップデート管理体制などの要件が定義され,サイバーセキュリティ管理システムの確立とその運用が求められる.またOTAアップデートについてはUN-R156が同時期に発効されており,車両のソフトウェアアップデートやそのソフトウェア管理システムについての要求がまとめられている.日本は両者ともいち早く対応し,新型自動車の型式審査・認証に管理システム適合証明が必要となるなど,車両内外の通信線路に対して強固かつ柔軟なセキュリティ対策・リスク管理体制の構築が求められている.
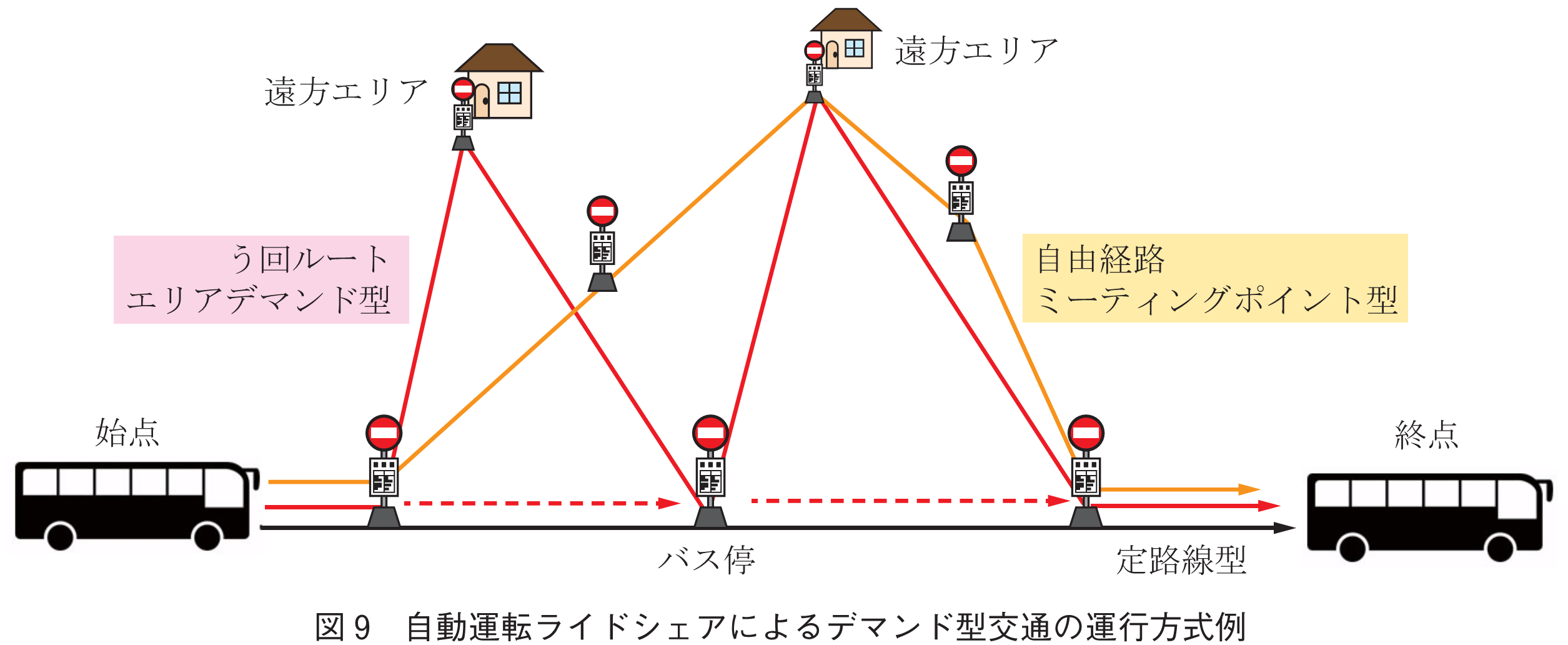
完全自動運転社会でキーとなるサービスとして高度なMaaSがある.Uberなどのライドシェアや,短時間カーシェアリングサービスもMaaSの一つであるが,完全自動運転車が普及した場合,従来あるサービスが一新される.ドライバレスで運用することが可能となるためサービスに係る人件費が大幅に削減できるだけでなく,業態そのものも転換されるであろう.例えば,レベル4完全無人タクシーについては,トラブル時にはリモートオペレータが対応する方策をとるなど,ドライバ業務からオペレータ業務へ移行されている.一方,路線バスなどの公共交通機関においてもライドシェアに似た形態が取り得る.図9に国土交通省が提言しているデマンド型交通の運行種類の例を挙げる(15).通常の路線バスではバス停のみの乗降車とスケジュールどおりの運行が規定されているが,ユーザ要求による適時運行や予約したバス停のみの乗降車など,要求(デマンド)に応じたサービスが容易に実現可能となる.例えば,定路線型は通常の路線バスと同様であるが,予約時のみ運行するものである.う回ルート型は定路線型をベースとしつつ予約に応じ,遠い地域へう回ルートを設定するものである.これは遠方エリアなどの公共交通機関空白地域へ適用し得る.自由経路型はバス停等を多数設置し最短経路で結ぶものである.タクシーとの法的差別化を図るため,ライドシェア・デマンド型交通は発着施設を限定するなどの必要があるものの,自動運転車両数が増えればドライバ不足の中でも公共交通機関の利便性が格段に向上する.しかしながら,自由経路では複数の行き先の異なる旅客が同乗する可能性があるため運航ルート最適化が必須である.渋滞などを考慮した複数地点の最短ルート探索となり,巡回サラリーマン問題にほかならない.自由経路の自動運転ライドシェアが普及する段階では最適ルート計算に必要な計算量が爆発的に増大する可能性があるため,旅客配置・運行計画立案がサービス提供のキーとなるであろう.
自動車はいまや日本の輸出入産業の基幹でもあり,日本で製造する自動車を国際基準に適合させることは必須である.一方,海外製造の自動車についても,日本国内法規にのっとった基準適合審査は必要不可欠である.このため,自動車の安全性を担保する各国の保安基準を国際的に協調・調和させる必要があり,WP.29等を通じて行われている.自動車運行には,その機能・技術が車両法及び省令により規定された保安基準を満足している必要があり,一般的には設計・製造段階で確認をする.型式指定と呼ばれ,例えば,車体形状や重量の外観的な項目から消音器や操縦装置,制動装置の規定など多数の項目が挙げられており,これらが合格しなければならない.OTAアップデートによるプログラム等改変についても保安基準が定められており,アップデート失敗時の自動ロールバックや電子的検査時にも容易なバージョン確認ができること及び不正変更の確認などが規定されている.
一方,自動運転機能については,車線維持(レーンキープ)機能や補正操舵,自動駐車機能については国際協調の下,保安基準にも盛り込まれている.しかしながら,自動運転レベル4等にも通じる手放しによる車線保持機能などについてはいまだWP.29でも議論中である.現状ではレベル3で認証された自動車をOTAによりレベル4へアップデートし運行することは困難である.安全の根幹に関わる議論となるため,OTAアップデートによる機能大幅刷新時の保安基準適合審査・型式再指定等は今後の議論が待たれる.
自動運転レベル4の法規要件については,2021年度から新たに国交省で検討が始まっている.例えば,自動運転車と歩行者も含めた他交通とのコミュニケーション手法確立やシステム責任の範囲の整理,システムが下す判断が社会的受容性を有するかについて調査検討が実施中である.
運輸・ロジスティクス用トラックや路線バス,空港など制限区域における車両運用などの領域で運転自動化実装が早いことが想定されるため,法的整理も着々と進んでいる.例えば,運送事業については道路運送法において無人自動運転車における旅客サービスの安全性・利便性に関するガイドラインを発行している.業として運用するため,レベル4自動運転車の安全性は有人運転車と同等とすることや,事故等発生時のトラブル対応のため運転者以外の管理者同乗や遠隔からの接続を必須とするなど,安全性を重視したものとなっている.保安基準においても,レベル4自動運転車向けにセンサやコンピュータ等の自動運行装置を保安基準対象装置に指定するなど,車両と運用に関する法的整理が進められている.
一方,自動運転車事故時の損害賠償責任についても同様である.2018年に取りまとめられた「自動運転に係る制度整備大綱」では,自動運転レベル4までは,迅速な被害者救済の観点に重きを置き,現行の自動車損害賠償保障法と同様とすることを結論付けた.つまり,民法の特則として,運行供用者(所有者等)に事実上の無過失責任を負わせることになる(16).つまり,自己及び運転者が自動車運行に関し注意を怠らなかったこと,被害者または運転者以外の第三者に故意または過失があったこと,自動車に構造上の欠陥または機能の障害がなかったことの3要件を運行供用者が立証しなければ賠償責任を負うこととなる.しかしながら,レベル5完全自動運転車では自己及び運転者が運行注意を行うのは困難を伴う可能性が高いため自動車損害賠償保障法ほか関連法規の見直しが必要となるであろう.
自動運転社会の実現に向けた技術課題と規制の現状について概説した.技術詳細については,本小特集別稿に譲るが,最先端半導体技術による計算リソースとセンサ機能向上が近年の運転自動化研究開発を加速させている.しかしながら,電動車ではバッテリーはモータ駆動のためにも必要であり,ガソリン車では発電容量とバッテリー容量の総量は多くはない.つまり,それほど多くの電源リソースを自動運転の制御に利用することは難しい.そのため,通信・ネットワーク・センサの低消費電力化はもとより,計算リソースの自車・インフラ最適配分等も課題となるであろう.2023年には日本でも一部地域で自動運転レベル4のサービス運用が開始された.完全自動運転レベル5に向けた規制・基準策定はこれからであり,技術開発の進展とセットで検討されなければならない.2030年代の完全自動運転サービス開始に向け,技術開発だけでなく社会受容性の向上も含めた取組みは今後も加速するであろう.
(1) 警察庁交通局,“令和4年中の交通死亡事故の発生状況及び道路交通法違反取締り状況等について,”March 2023.
(2) World Health Organization, “Road safety report 2018,” June 2018.
(3) SAE Standard J3016_202104, “Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles,” April 2021.
(4) “Life goes to The Futurama at World’s Fair where General Motors Shows the America of 1960,” LIFE, vol.23, no.6, pp,79-85, June, 1939.
(5) Autonomous Driving: Technical, Legal and Social Aspects, M. Maurer, J.C. Gerdes, B. Lenz, and H. Winner eds., Springer, 2016.
(6) 津川定之,“自動車の自動運転システム,”日本ロボット学会誌,vol.13, no.7, pp.946-949, Oct. 1995.
(7) Urban Challenge Event Program, Feb. 2008.
https://www.grandchallenge.org/grandchallenge/docs/UC07UCEBrochuretoPrint.pdf
(8) 尾崎 暢,佐々木 繁,“自律走行車PVSの視覚システム,”信学誌,vol.77, no.1, pp.42-45, Jan. 1994.
(9) 独立行政法人新エネルギー・産業技術総合開発機構 研究評価委員会, “「エネルギーITS推進事業」事後評価報告書,”
Dec. 2013.
https://www.nedo.go.jp/content/100564241.pdf
(10) M. Mikami and H. Yoshino, “Field trial on 5G low latency radio communication system towards application to truck platooning,” IEICE Trans. Commun., vol.E102-B, no.8, pp.1447-1457, Aug. 2019.
(11) https://twitter.com/johnkrafcik/status/1020343952266973186
(12) 内閣官房自動走行に係る官民協議会,“地域移動サービスにおける自動運転導入に向けた走行環境条件の設定のパターン化参照モデル(2020年モデル),”Dec. 2019.
(13) 伊藤嘉浩,“車載ネットワークとIEEE 802.1TSN標準,”信学技報,RCS2021-6, pp.21-24, April 2021.
(14) NASA Engineering and Safety Center Technical Assessment Report, “Technical support to the national highway traffic safety administration (NHTSA) on the reported Toyota Motor Corporation (TMC) unintended acceleration (UA) investigation,” Jan. 2011.
(15) 国土交通省中部運輸局,“続・デマンド型交通の手引き,”March 2014.
(16) 内閣官房高度情報通信ネットワーク社会推進戦略本部(IT総合戦略本部),“自動運転に係る制度整備大綱,”April 2018.
(2023年8月31日受付 2023年9月25日最終受付)

オープンアクセス以外の記事を読みたい方は、以下のリンクより電子情報通信学会の学会誌の購読もしくは学会に入会登録することで読めるようになります。 また、会員になると豊富な豪華特典が付いてきます。
電子情報通信学会 - IEICE会誌はモバイルでお読みいただけます。
電子情報通信学会 - IEICE会誌アプリをダウンロード

![]()